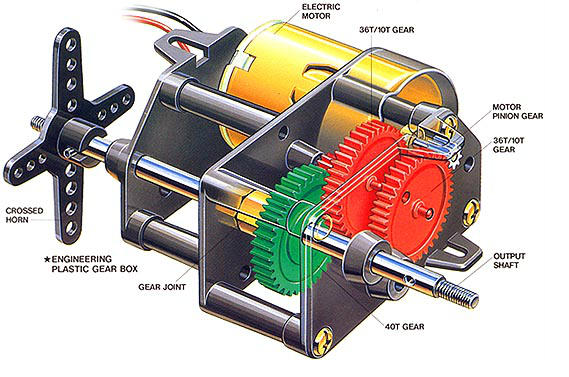
سرو موتور نوعی از موتورهای الکتریکی هستند که بسیار دقیق عمل میکنند. سرو موتور در شکلهای مختلف با کاربریهای مختلفی طراحی و تولید میشوند. سرو موتورهای رباتیکی با قابلیت تعیین زاویه، یکی از عمده موارد این مدل هستند. در این متن سعی کردهایم به تمامی سوالات شما پاسخ دهیم، تیترها را دنبال کنید.
سروو موتور Servo Motor
سروو موتور نوعی از موتورهای الکتریکی است که با هدف بکارگیری در سیستمهای کنترل فیدبک طراحی میشود. لختی (اینرسی) در موتور سروو Servo Motor پایین بوده و در نتیجه تغییر سرعت در این موتورها بسیار سریع است. سروو موتورها در صنعت کاربری های منحصر به فردی دارند. گونه های مختلف سروو موتور بر اساس زاویه دوران شافت و جنس گیربکس دسته بندی می شوند. از هدایت نازل CNC پرینتر سه بعدی، مدیریت حجم بطری در خطوط تولید نوشابه، گیمبال پهپاد و… کاربرد دارند. مهمترین پارامتر در یک سروو موتور زاویه دوران شافت می باشد. در سیستمهای هوشمند و اینترنت اشیا IOT هم بسیار پرکاربرد ظاهر شدهاند. برای مدیریت سروو موتور نیاز به موج مربعی یا PWM است. به عبارت دیگر سرو موتور Servo Motor یک موتور کوچک دارای یک محور یا شافت خروجی است. این محور خروجی قادر است در یک موقعیت و زاویه خاص با سیگنال دریافتی قرار گیرد.
کاربرد میکروسرو موتور چیست؟
میکروسرو موتورها، انواعی از موتورهای الکتریکی هستند که اندازه کوچکی دارند و برای انجام حرکات دقیق و پیچیده در دستگاهها و تجهیزات الکترونیکی مورد استفاده قرار میگیرند. کاربردهای میکروسرو موتور شامل موارد زیر میشوند:
کنترل حرکت در دستگاههای پزشکی و تجهیزات دقیق مانند میکروسکوپها
کنترل حرکت در دستگاههای اتوماتیک مانند دستگاههای تولید خودکار
کنترل حرکت در دستگاههای ارتباطی مانند تلفن همراه و دستگاههای جیبی
کنترل حرکت در دستگاههای خانگی مانند دستگاههای چاپ و دستگاههای خودپاککن دستی
کنترل حرکت در دستگاههای رباتیک و دستگاههای هواپیمای بدون سرنشین
تفاوت سرو موتور 180 درجه و 360 درجه چیست؟
سروموتورهای 180 و 360 درجه، دو نوع موتور سرو هستند که برای کاربردهای مختلفی استفاده میشوند. تفاوت اصلی بین این دو نوع موتور در زاویه چرخش آنهاست.
سروموتور 180 درجه: این نوع موتور با دقت 180 درجه چرخش میکند، یعنی یک دور کامل را نمیتواند چرخش کند بلکه فقط 180 درجه چرخش دارد. این موتورها از قابلیت پایداری و دقت بالایی برخوردارند و برای کاربردهایی مانند کنترل پروژههای رباتیک، سیستمهای تهویه مطبوع و دربهای خودکار استفاده میشوند.
سروموتور 360 درجه: در مقایسه با سروموتور 180 درجه، این نوع موتور با دقت 360 درجه چرخش میکند، یعنی برای انجام یک دور کامل، به 360 درجه نیاز دارد. این نوع سروموتورها از دقت کمتری برخوردارند اما با قابلیت دوران بینهایت، برای کاربردهایی مانند روتاسیون دوربینها و پروژههایی که نیاز به چرخش بینهایت دارند، استفاده میشوند.
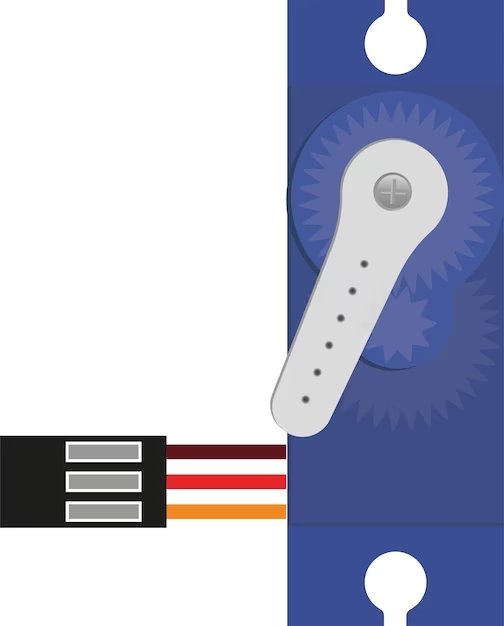
پایه های pinout سرو موتور sg90
سروموتور SG90 دارای 3 پایه میباشد. پایه سمت چپ گراند میباشد، پایه وسط به پایه دیتا متصل میشود و پایه سمت راست به منبع تغذیه متصل میشود. به طور کلی پین های SG90 به شکل زیر میباشد:
پایه 1: گراند (GND)
پایه 2: دیتا (Data)
پایه 3: تغذیه (VCC)
از چه کتابخانه هایی برای راه اندازی سرو موتور با آردوینو استفاده کنیم؟
برای راه اندازی سروموتور با آردوینو، میتوانید از کتابخانه Servo استفاده کنید که در کتابخانههای پیشفرض آردوینو موجود است. این کتابخانه شامل توابعی است که به شما امکان کنترل پایههای سروموتور را میدهد. به طور کلی، با استفاده از این کتابخانه، میتوانید سروموتور را در زوایای مختلف حرکت داده و در دستگاههایی که به کنترل دقیق زاویه نیاز دارند، استفاده کنید. همچنین میتوانید از کتابخانههای دیگری نیز برای کنترل سروموتور استفاده کنید که در برخی موارد قابلیتهای بیشتری از جمله تغییر سرعت و شتاب را نیز دارند.
پالس pwm و راه اندازی سرو موتور
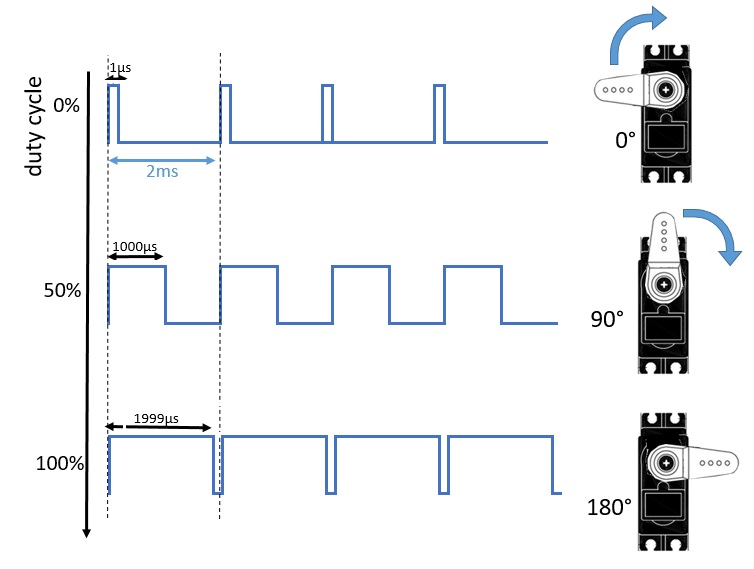
PWM یا Pulse Width Modulation یک تکنیک کنترلی است که در آن مقدار و زمان پالسهای الکتریکی تغییر میکند تا یک ولتاژ میانگین خاص تولید شود. در راه اندازی سرو موتور با استفاده از PWM، یک پالس الکتریکی با فرکانس 50Hz تولید میشود که عرض پالس آن تغییر کرده و باعث چرخش سرو موتور به جهت و درجه دلخواه میشود. با استفاده از PWM، میتوان سرعت و جهت چرخش سرو موتور را به دقت تنظیم کرد و از آن برای کاربردهای مختلفی مانند رباتیک، کنترل دقیق حرکت یک دستگاه و ... استفاده کرد.
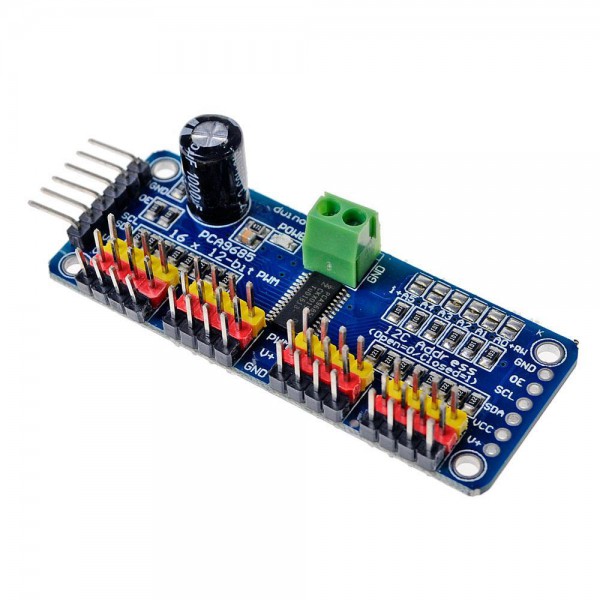
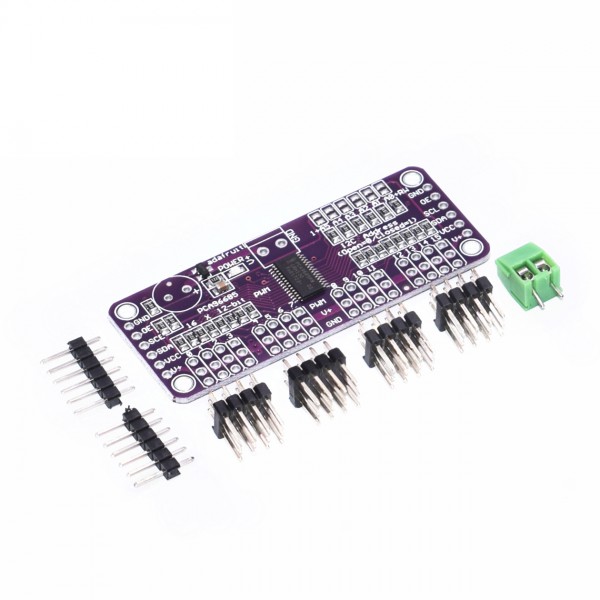
پایه های pinout درایور PCA9685
درایور PCA9685 یک درایور سرو موتور، موتور DC و دیگر دستگاه های الکترونیکی است که به کمک پروتکل I2C کنترل میشوند. این درایور یک I2C با 16 کانال خروجی PWM با فرکانس قابل برنامهریزی است که به صورت خودکار انتخاب میکند که هر کدام از چه مقدار Duty cycle باید داشته باشند. پایه های Pinout این درایور به شرح زیر هستند.
V+ (تغذیه): محدوده ولتاژ تغذیه این پین ۳ تا ۵٫۵ ولت است.
GND: مربوط به زمین مدار یا همان منفی است.
SCL: پایه ارتباط I2C سیستم، برای ارتباط با پایه SCL آردوینو از پایه A5 استفاده می شود.
SDA: پایه ارتباط I2C سیستم، برای ارتباط با پایه SDA آردوینو از پایه A4 استفاده می شود.
OE (Output Enable): این پین برای فعال یا غیرفعال کردن خروجی ها به کار میرود.
LED: این پین برای نشاندادن وضعیت قدرت درایور وجود دارد.
V+ (بیشترین ولتاژ خروجی): این پین برای تأمین تغذیه به سروموتور ها مورد استفاده قرار میگیرد.
8 تا 15: این پایه ها برای خروجی PWM 16 کاناله درایور به کار میروند. هر کانال میتواند از ۱۰۰۰ تا ۴۰۹۵ مقدار PWM را تولید کند.
دستورات مهم راه اندازی سرو موتور در آردوینو
دستورات مهم راه اندازی سروموتور در آردوینو به شرح زیر هستند.
attach(pin): این دستور برای اتصال سروموتور به پین مشخص شده در آردوینو استفاده می شود. مثال: myservo.attach(9)
write(angle): این دستور برای تعیین زاویه مورد نظر برای سروموتور استفاده میشود. مقدار angle بین 0 تا 180 درجه است. مثال: myservo.write(90)
read(): این دستور برای خواندن زاویه فعلی سروموتور استفاده میشود. مثال: int pos = myservo.read();
writeMicroseconds(value): این دستور برای تعیین زمان پالس سیگنال PWM برای کنترل سروموتور استفاده میشود. مقدار value بر حسب میکروثانیه است. مثال: myservo.writeMicroseconds(1500)
attached(): این دستور برای بررسی اینکه سروموتور به پین مشخص شده متصل شده است یا خیر، استفاده میشود. مثال: if (myservo.attached()) { // do something }
detach(): این دستور برای جدا کردن سروموتور از پین مشخص شده استفاده میشود. مثال: myservo.detach()
تفاوت سرو موتور mg995 و mg996 چیست؟
سروموتورهای MG995 و MG996 از نظر ظاهری شبیه به هم هستند، اما در واقع دو مدل متفاوت از سروموتورهای سری MG هستند. تفاوتهای اصلی بین این دو مدل به شرح زیر هستند.
گشتاور: سروموتور MG996 دارای گشتاور بالاتری نسبت به MG995 است که برای برخی کاربردها از اهمیت بالایی برخوردار است.
سرعت: MG996 با سرعت بیشتری عمل میکند نسبت به MG995، اما در برخی کاربردها سرعت کمتر ممکن است مفید باشد.
ولتاژ عملکرد: هر دو مدل با ولتاژ 4.8 تا 7.2 ولت عمل میکنند، اما برای استفاده از حداکثر قدرت و گشتاور، ولتاژ 6 ولت به بالا توصیه میشود.
نویز و دقت: MG996 دارای نویز و دقت بیشتری است نسبت به MG995
به طور کلی، هر دو سروموتور محصولات با کیفیت و پرطرفداری در بازار هستند و میتوانند برای بسیاری از کاربردهای رباتیک و الکترونیکی مناسب باشند.