






سرو موتور MG995 دنده فلزی 360 درجه طرح تاور پرو Tower Pro با مبدل شافت و پیچ و اتصالات
سرو موتور MG995
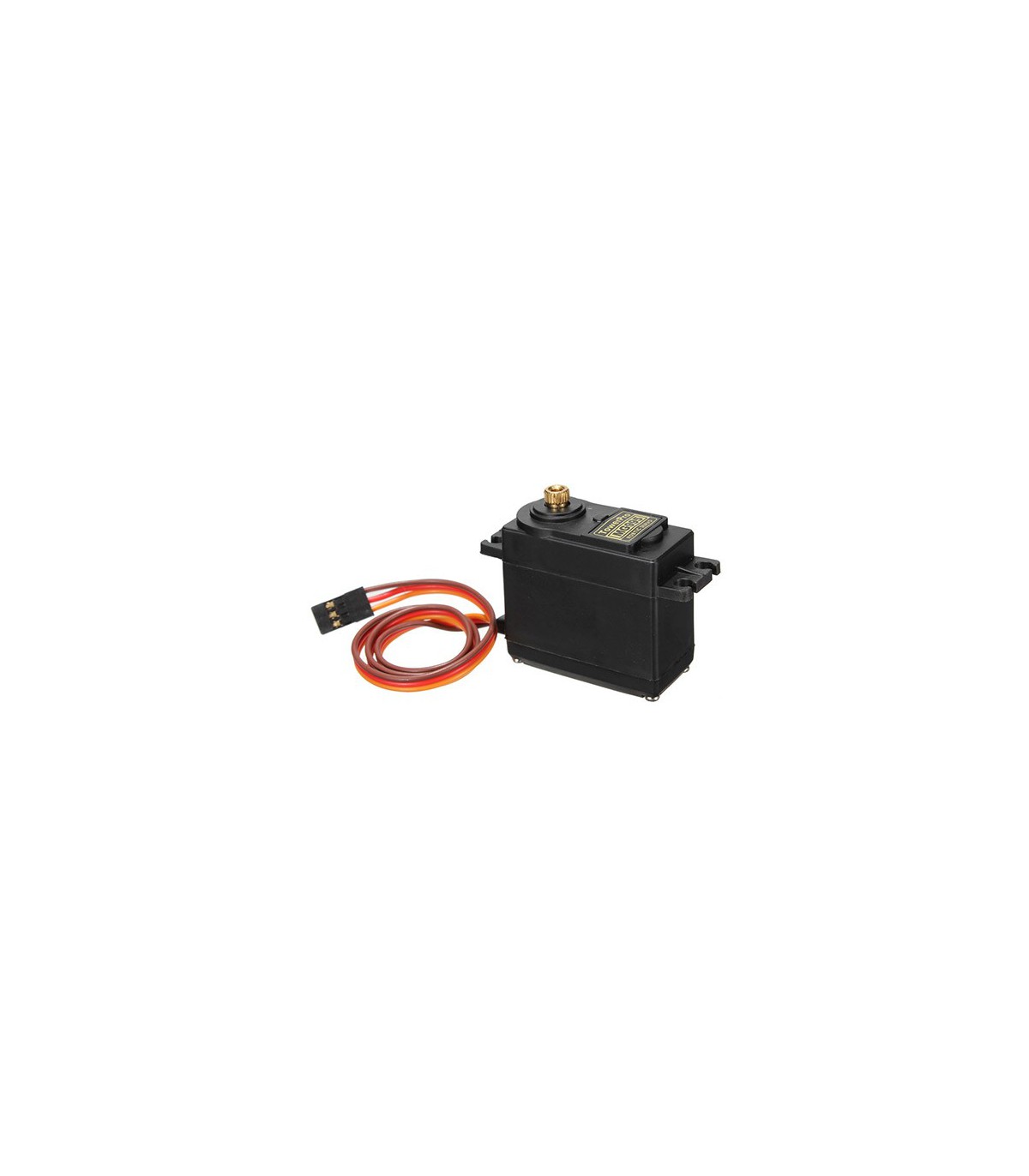
سرو موتور MG995 با روکش فلزی 90 درجه، طرح Tower Pro، یکی از سروموتورهای استاندارد و محبوب در دنیای رباتیک و الکترونیک است. این سروموتور از طراحی قدرتمند و عملکرد بالایی برخوردار است و به عنوان یک سروموتور استاندارد برای کاربردهای مختلف مورد استفاده قرار میگیرد.
ویژگیهای سروموتور MG995
- زاویه چرخش 90 درجه: این سروموتور قادر است در یک زاویه چرخش 90 درجه عمل کند، که به طور کلی برای بسیاری از برنامهها کافی است.
- قدرت و توان خروجی بالا: سروموتور MG995 با قدرت و توان خروجی بالا تا 15 کیلوگرم-سانتیمتر (kg-cm) از طراحی قوی برخوردار است. این قدرت برای تحمل بارهای سنگین و اجرای حرکتهای قوی و دقیق بسیار مناسب است.
- روکش فلزی: با داشتن روکش فلزی، سروموتور MG995 به صورت بهتری در برابر ضربه و سایر خطرات محافظت میشود و مقاومت بیشتری را در مقابل شرایط سخت دارد.
- طراحی Tower Pro: این سروموتور توسط شرکت Tower Pro طراحی شده است. Tower Pro یکی از برندهای معتبر و مشهور در صنعت سروموتورهای رباتیک است و ارائهدهنده محصولات با کیفیت و قابل اعتماد میباشد.
بررسی پایه های سرو موتور MG995
- پایه VCC (مثبت): این پایه برای اتصال به منبع تغذیه مثبت (5 ولت) استفاده میشود. این پایه به منظور تأمین برق مورد نیاز سروموتور استفاده میشود.
- پایه GND (زمین): این پایه برای اتصال به منبع تغذیه منفی (زمین) استفاده میشود. اتصال این پایه به منبع تغذیه منفی مورد نیاز سروموتور را فراهم میکند.
- پایه PWM (عرض پالس): این پایه برای اتصال به سیگنال کنترل سروموتور (از طریق میکروکنترلر یا برد کنترل سروموتور) استفاده میشود. از طریق این پایه، سیگنال PWM با عرض پالس متناسب با موقعیت مطلوب سروموتور ارسال میشود.
.jpg)
به همراه سرو موتور چه اقلامی باید خریداری شود؟
- آردوینو
- تستر سرو موتور
- تغذیه
- کابل
راه اندازی سرو موتور MG995 با آردوینو
در ادامه یک کد آردوینو برای سرو موتور MG995 نوشته شده است. در این کد آردوینو ابتدا کتابخانه "Servo" را با استفاده از دستور #include <Servo.h> فراخوانی میکنیم. این کتابخانه امکان کنترل سرو موتورها را بر روی برد آردوینو فراهم میکند.یک شیء به نام "mg995Servo" از نوع "Servo" ایجاد میکنیم. این شیء برای کنترل سرو موتور MG995 استفاده میشود.تابع "setup()" یک بار در ابتدای اجرای برنامه فراخوانی میشود. با استفاده از دستور mg995Servo.attach(9);، سرو موتور را به پین 9 برد آردوینو متصل میکنیم. این پین باید دارای قابلیت PWM (پالس عرض متناسب) باشد، زیرا سیگنال PWM برای کنترل سرو موتور استفاده میشود.با استفاده از دستور mg995Servo.write(0);، سرو موتور را به موقعیت شروع (0 درجه) میچرخانیم. با دستور delay(1000);، برنامه به مدت 1 ثانیه صبر میکند.سپس با دستور mg995Servo.write(90);، سرو موتور را به موقعیت میانی (90 درجه) میچرخانیم و دوباره برای 1 ثانیه صبر میکنیم.در نهایت با دستور mg995Servo.write(180);، سرو موتور را به موقعیت پایانی (180 درجه) میچرخانیم و دوباره برای 1 ثانیه صبر میکنیم.
#include <Servo.h>
// ساخت یک شیء سرو موتور
Servo mg995Servo;
void setup() {
// اتصال سرو موتور به پین 9
mg995Servo.attach(9);
}
void loop() {
// حرکت سرو موتور به موقعیت شروع (0 درجه)
mg995Servo.write(0);
delay(1000); // صبر برای 1 ثانیه
// حرکت سرو موتور به موقعیت میانی (90 درجه)
mg995Servo.write(90);
delay(1000); // صبر برای 1 ثانیه
// حرکت سرو موتور به موقعیت پایانی (180 درجه)
mg995Servo.write(180);
delay(1000); // صبر برای 1 ثانیه
}
راه اندازی سرو موتور MG995 با میکروپایتون
برای راه اندازی سرو موتور با میکروپایتون، ابتدا با استفاده از دستور from machine import Pin, PWM، کتابخانههای مورد نیاز برای کنترل پینها و سیگنال PWM را از ماژول machine فراخوانی میکنیم.با استفاده از دستور pin_pwm = Pin(14)، پین PWM مورد نظر (پین 14) را تعریف میکنیم. این پین به سرو موتور MG995 متصل خواهد شد.با استفاده از دستور servo_pwm = PWM(pin_pwm)، شیء PWM را برای کنترل سرو موتور ایجاد میکنیم.تابع حرکت_سرو(زاویه) تعریف شده است که وظیفه حرکت سرو موتور به زاویهای که به عنوان ورودی داده میشود را بر عهده دارد. زاویه ورودی به عنوان پارامتر داخلی تابع گرفته میشود.در خط دوره_چرخش = int(زاویه / 180 * 1023)، محاسبهی دوره چرخش برای PWM انجام میشود. سرو موتور MG995 برای حرکت در بازه 0 تا 180 درجه، از دوره PWM حدود 0 تا 1023 استفاده میکند. بنابراین، زاویهی ورودی بر اساس این محدوده به دورهی PWM تبدیل میشود.در خط servo_pwm.duty(دوره_چرخش)، دورهی PWM محاسبه شده را به عنوان دورهی کاری PWM ست میکنیم. این عمل باعث حرکت سرو موتور به زاویهی مورد نظر میشود. دستور servo_pwm.freq(50)، فرکانس PWM به 50 هرتز تنظیم میشود. این فرکانس بهطور معمول برای سرو موتور MG995 استفاده میشود.با استفاده از تابع حرکت_سرو() و دستورات time.sleep(1)، سرو موتور به سه زاویهی مختلف (0، 90 و 180 درجه) حرکت میکند، و هر بار بین حرکات، به مدت 1 ثانیه تاخیر دارد.در آخر، با دستور servo_pwm.deinit()، سیگنال PWM متوقف میشود و سرو موتور را آزاد میکند.
from machine import Pin, PWM
import time
# تعیین پین PWM برای کنترل سرو موتور
pin_pwm = Pin(14)
servo_pwm = PWM(pin_pwm)
# تابع حرکت سرو موتور به زاویهی مشخص
def حرکت_سرو(زاویه):
دوره_چرخش = int(زاویه / 180 * 1023)
servo_pwm.duty(دوره_چرخش)
# تنظیم فرکانس سیگنال PWM (سرو موتور MG995 با حدود 50 هرتز کار میکند)
servo_pwm.freq(50)
# حرکت سرو موتور به موقعیت شروع (0 درجه)
حرکت_سرو(0)
time.sleep(1) # صبر برای 1 ثانیه
# حرکت سرو موتور به موقعیت میانی (90 درجه)
حرکت_سرو(90)
time.sleep(1) # صبر برای 1 ثانیه
# حرکت سرو موتور به موقعیت پایانی (180 درجه)
حرکت_سرو(180)
time.sleep(1) # صبر برای 1 ثانیه
# خاتمه دادن به سیگنال PWM (اختیاری)
servo_pwm.deinit()
مشخصات
- کاربری
- صنعتی
- نوع موتور
- سروو - Servo
- ولتاژ مورد نياز
- 4.8 تا 7.2 ولت DC
- دمای کاری
- 0 تا 55 درجه سانتی گراد
- اقلام همراه محصول
- دارای شافت و پیچ و اتصالات
- زاویه چرخش
- 360 درجه
- جنس چرخ دنده
- دنده فلزی
- سایر توضیحات
- کنترل با سیگنال PWM