چرخ رباتیک نوعی از اجزای متحرک در ساخت ربات است. چرخها ابعاد مختلف و ظاهر مختلفی دارند. براساس میزان وزن و فشاری که میتوانند تحمل کنند متفاوت خواهند بود. البته چرخ و تایر به مفهوم ساده و اولیه آن نیستند و انواع مختلفی از آنها برای استفاده در ربات وجود دارند. در این متن سعی کردهایم به تمامی سوالات شما پاسخ دهیم. تیترها را دنبال کنید.
شناخت چرخ و تایر رباتیک
چرخ و تایر ربات دو عنصر اصلی در ساختار حرکت ربات هستند. در ادامه، توضیحاتی درباره چرخ و تایر رباتیک را مشاهده میکنید.
- چرخ رباتیک: چرخها در رباتها برای ایجاد حرکت و جابجایی استفاده میشوند. آنها معمولا به صورت استوانهای شکل هستند و در بخشهای مختلف ربات نصب میشوند. چرخها میتوانند با موتورها و سیستمهای کنترلی متصل شده و حرکت را از طریق چرخش آنها انتقال دهند. طراحی چرخها معمولا به منظور افزایش لغزش و جذب بر روی سطح زمین، الگوها و روکشهای متنوعی را در نظر میگیرد.
- تایر رباتیک: تایرها به صورت روکشهایی بر روی چرخها نصب میشوند و عملکرد مهمی در پیمایش و حرکت ربات دارند. تایرها معمولا از مواد لاستیکی و یا فوم ساخته میشوند که انعطافپذیری و جذب شوک را بهبود میبخشند. ضخامت، الگوی سطح تماس و سختی تایرها بستگی به نیازهای ربات و سطوحی که ربات بر آن حرکت میکند، دارد. تایرها همچنین بهبود وضعیت تراکم، جذب لرزش و کنترل بیشتر را در پیمایش روی سطوح نامناسب فراهم میکنند.
چرخ و تایر بستگی مستقیم به نیازها و محیط کاری ربات دارند. برای رباتهایی که در سطوح ناهموار یا محیطهای خاص مانند صنعتی یا بیرونی عمل میکنند، چرخها و تایرهایی با الگوی سطح تماس و خصوصیات خاص ممکن است استفاده شوند. همچنین، در تعیین نوع چرخ و تایر مورد استفاده برای ربات، عواملی مانند مقیاس ربات، وزن، سرعت، ثبات و کنترل نیز باید در نظر گرفته شوند.
 معرفی انواع چرخ رباتیک
معرفی انواع چرخ رباتیک
چرخهای رباتیک یکی از اجزای مهم در ساختار حرکت رباتها هستند. آنها برای ایجاد پیمایش و جابجایی ربات در محیط استفاده میشوند. چرخهای رباتیک معمولا به صورت استوانهای شکل بوده و بر روی شاسی ربات نصب میشوند. در ادامه، برخی از نوعهای مختلف چرخهای رباتیک را توضیح میدهیم.
- چرخهای جلوگیری (Traction Wheels): این نوع چرخها دارای الگوهای ضلعی یا شاخکهایی بر روی سطح آنها هستند. این الگوها باعث ایجاد آرمانسازی بین چرخ و سطح زمین میشوند و ربات را قادر به پیمایش در سطوح نامناسب یا زمینهای لغزنده میکنند.
- چرخهای لاستیکی (Rubber Wheels): چرخهای لاستیکی عموما از جنس لاستیک ساخته میشوند و دارای الاستیسیته مناسبی هستند. این نوع چرخها به خوبی در سطوح صاف عملکرد میکنند و از خراشیدن سطحهای زمین جلوگیری میکنند. همچنین، به دلیل ویژگیهای خاص لاستیک، این چرخها به عنوان عامل جذب و کاهش لرزشها نیز عمل میکنند.
- چرخهای همه جهته یا مستقل (Omni Wheels): چرخهای مستقل، معمولا با چندین رولر کوچک که در جهتهای مختلف قرار دارند، ساخته میشوند. این رولرها به چرخها اجازه میدهند به صورت مستقل در جهتهای عمودی و افقی حرکت کنند. چرخهای مستقل برای ایجاد حرکت و چرخش بیدرنگ و بازتاب بهتر از دیگر چرخها مورد استفاده قرار میگیرند.
- چرخهای کاستور (Caster Wheels): این چرخها به صورت یک چرخ کوچک در جلو یا عقب ربات نصب میشوند و به ربات امکان جابجایی در جهتهای مختلف را میدهند. چرخهای کاستور به صورت مستقیم در جهت حرکت ربات تأثیر نمیگذارند و فقط در جهت چرخش ربات موثر هستند.
- چرخهای مکانوم (Mecanum Wheels): الگوی خاصی از رولرها که در زوایای ۴۵ درجه به چرخ نصب شدهاند؛ قابلیت حرکت در جهتهای مختلف را به چرخ میدهند؛ استفاده در رباتهایی که نیاز به حرکت و مهارت بالا در فضاهای محدود دارند.
- چرخهای هرزگرد: چرخ عادی با رولرهای کوچک در جهت عمودی؛ قابلیت حرکت در جهتهای مختلف را به چرخ میدهند؛ استفاده در رباتهایی که نیاز به حرکت چندجهته و چرخش دورانی با دوران کم دارند. معمولا دارای یک ساچمه غلطان داخل یک محفظه فلزی هستند. در این صفحه میتوانید انواع چرخ هرزگرد را بررسی کنید.
همچنین، برای رباتهایی که نیاز به پیمایش در سطوح نامناسب یا غیر صاف دارند، میتوان از ترکیب چندین نوع چرخ متفاوت استفاده کرد تا عملکرد بهتری در آن شرایط داشته باشند. نوع چرخ مورد استفاده برای ربات بستگی به نیازهای خاص طراحی و عملکرد ربات دارد. برنامه ربات و محیط استفاده نیز نقش مهمی در انتخاب مناسب چرخهای رباتیک ایفا میکند.
چرخ زنجیری یا چرخ شنی رباتیک
چرخ شنی لاستیکی یا چرخهای زنجیری، نوعی از چرخهای رباتیک هستند که برای مواجهه با سطوح نامناسب و دشوار مورد استفاده قرار میگیرند. آنها به جای رولرها یا سطح صاف، یک زنجیره فلزی یا لاستیکی دارند که به طول یا عرض چرخ امتداد دارد. در ادامه، برخی از ویژگیها و کاربردهای چرخهای شنی را بررسی میکنیم.
 ویژگیهای چرخهای شنی
ویژگیهای چرخهای شنی
- آب و هوایی: چرخهای شنی مناسب برای استفاده در سطوح خاکی، شنی، برفی و دشوار میباشند. آنها قادر به سرکوبی و عبور از سطوح نرم و ناهموار میباشند.
- چسبندگی: طراحی زنجیره در چرخهای شنی، قابلیت چسبندگی بیشتر را بر روی سطح مورد استفاده فراهم میکند. این ویژگی باعث افزایش ثبات و کنترل ربات در سطوح نامناسب میشود.
- توانایی پیمایش: با توجه به طراحی و ساختار چرخهای شنی، ربات قادر به پیمایش در سطوح ناهموار و شیبدار است. زنجیرهها میتوانند به خوبی بر روی سطوح نرم، ماسهای و سطوح با غلظت بالای برف کار کنند.
کاربردهای چرخهای شنی
- رباتیک زمینی: چرخهای شنی برای رباتهای زمینی در برخی کاربردها مانند رباتهای پیمایشی در محیطهای پرپیچ و خم و معتدل، رباتهای کشاورزی در زمینهای کشاورزی، و رباتهای برفروب در مناطق پربرف مورد استفاده قرار میگیرند.
- رباتیک خاکی: چرخهای شنی در رباتهایی که برای کاوش و پیمایش در خاک استفاده میشوند، مفید هستند. آنها قادر به عبور از سطوح خاکی نرم، ماسهای و خاکی با مانعهای کوچک میباشند.
- رباتیک برفروب: چرخهای شنی به دلیل قابلیت عبور از برف ضخیم و استفاده در شرایط آب و هوای سرد و برفی، در رباتهای برفروب و خدمات برفروبی استفاده میشوند.
- رباتیک صنعتی: در برخی کاربردهای صنعتی مانند رباتهای جابجایی بار، چرخهای شنی به عنوان یک راه حل برای حرکت و جابجایی در سطوح غیر صاف و غیر منظم مورد استفاده قرار میگیرند.
چرخ شنی لاستیکی با توجه به قابلیتهای حرکتی و کاربردهای خاص خود، به رباتها در مواجهه با سطوح نامناسب کمک میکنند و امکان پیمایش در شرایط محیطی خاص را فراهم میکنند.
 شناخت چرخ مکانوم Mecanum
شناخت چرخ مکانوم Mecanum
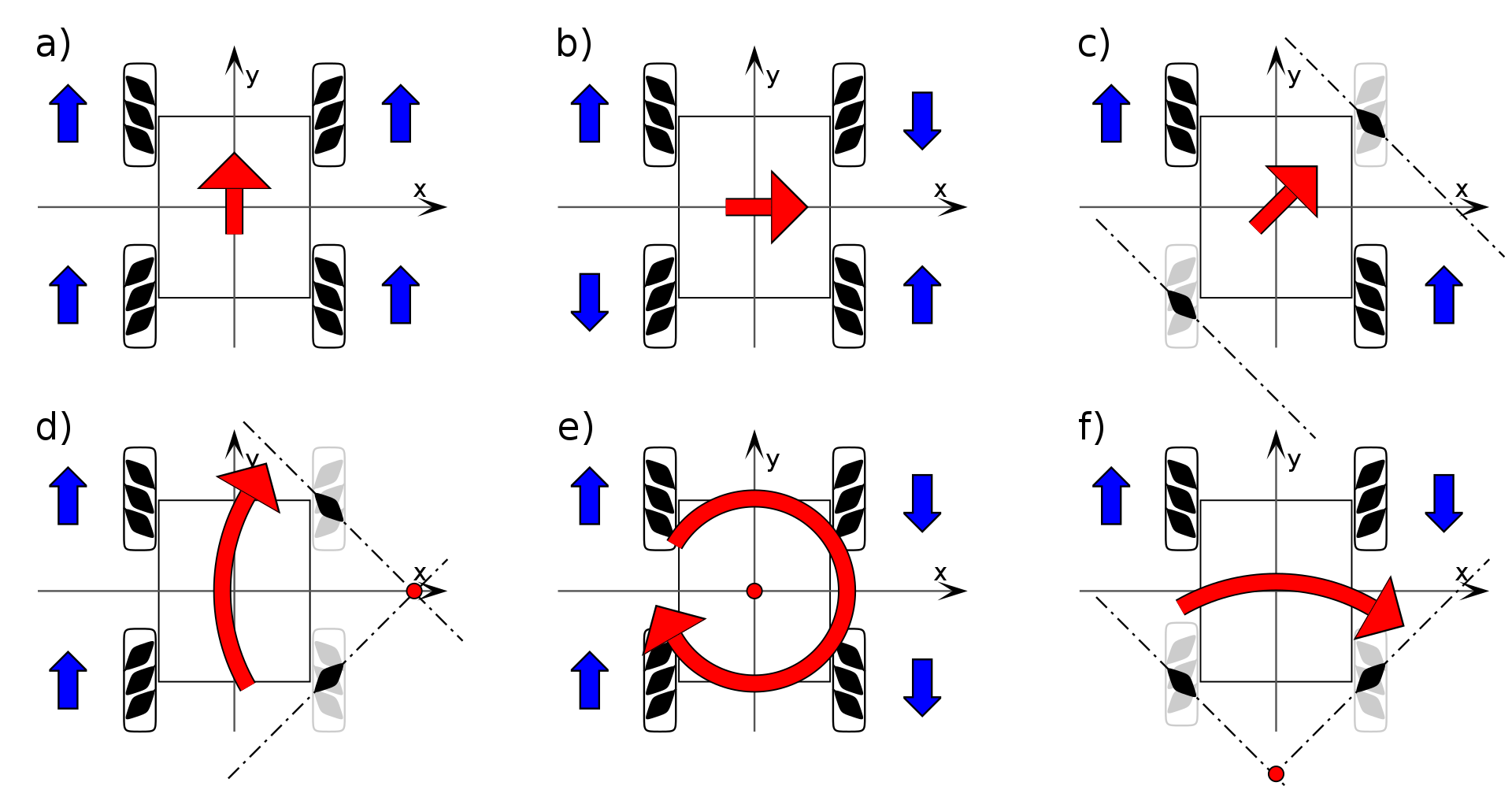
چرخ مکانوم یک نوع ویژه از چرخهای رباتیک است که برای ایجاد حرکت و جابجایی در جهتهای مختلف استفاده میشود. این چرخها دارای الگوی خاصی از رولرها هستند که در زوایای 45 درجه به چرخ نصب میشوند. الگوی خاص رولرها در چرخ مکانوم به آن امکان میدهد که چرخ در جهتهای مختلف حرکت کند. هر چرخ مکانوم مستقل از بقیه عمل میکند و قادر است به صورت مستقل در جهت خاصی حرکت کند.
چرخهای مکانوم برای رباتها که نیاز به حرکت و مهارت بالا در فضاهای محدود دارند، بسیار مناسب هستند. با استفاده از ترکیب حرکت چرخهای مکانوم، ربات قادر است به جابجایی در هر جهت و همچنین حرکت کروی یا مستقیم بپردازد. این قابلیتهای حرکتی چرخ مکانوم به رباتها اجازه میدهد تا به صورت دقیق و با آسانی در فضاهای محدود و پرپیچ و خم عمل کنند. چرخ مکانوم عمدتا در رباتهایی استفاده میشود که برای کاربردهای مانند رباتهای پیمایشی، رباتهای خدماتی و رباتهای صنعتی طراحی میشوند. به طور خلاصه، چرخ مکانوم یک نوع ویژه از چرخهای رباتیک است که قابلیت حرکت در جهتهای مختلف را به ربات میدهد. این چرخها به رباتها امکان پیمایش دقیق و آسان در فضاهای محدود را میبخشند.
مکانیزم عملکرد چرخ مکانوم
روش عملکرد چرخ مکانوم بر اساس طراحی خاص رولرهای آن است. هر چرخ مکانوم دارای یک الگوی خاص از رولرها است که در زوایای ۴۵ درجه به چرخ نصب میشوند. بدون تأثیر روی حرکت سایر چرخها. این الگوی رولرها به چرخ امکان حرکت به جلو و عقب، چرخش به سمت راست و چپ، و حرکت کروی (خراب کننده) را میدهد. عملکرد چرخ مکانوم بر اساس تغییر سرعت و جهت چرخش رولرها انجام میشود.
با تغییر سرعت و جهت چرخش رولرها، چرخ مکانوم قادر است به صورت مستقل در جهت مورد نظر حرکت کند. به عنوان مثال، اگر رولرها در یک جهت عقب حرکت کنند، چرخ مکانوم به عقب حرکت میکند، و اگر رولرها در جهت راست چرخش کنند، چرخ مکانوم به سمت راست چرخش میکند. تغییر سرعت و جهت چرخش رولرها به طور معمول توسط سیستم کنترلی ربات کنترل میشود.
سیستم کنترل به رولرها دستور میدهد تا به سرعت و جهت مورد نظر حرکت کنند و این باعث حرکت متناسب چرخ مکانوم میشود. به طور خلاصه، عملکرد چرخ مکانوم بر اساس تغییر سرعت و جهت چرخش رولرها انجام میشود. هر رولر در چرخ مکانوم به صورت مستقل حرکت میکند و این به چرخ امکان میدهد که به صورت مستقل در جهتهای مختلف حرکت کند. این ویژگی برای رباتها امکان پیمایش دقیق و آسان در فضاهای محدود را فراهم میکند.