توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
موتور سرو MG995 سرو موتور 360 درجه است. این موتور سروو با گشتاور قوی عمل میکند و کنترل دقیقی را بر روی چرخش خود فراهم میکند. با ولتاژ عملیاتی بین ۴٫۸ تا ۷٫۲ ولت عمل میکند و دارای دندههای فلزی برای مقاومت در برابر سایش است.
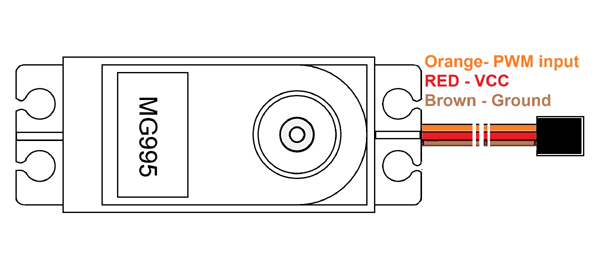
یک کد آردوینو برای سرو موتور MG995 نوشته شده است. در این کد، از کتابخانه Servo برای کنترل موتور سرو MG995 استفاده شده است. ابتدا یک شیء Servo به نام mg995Servo ایجاد میشود. سپس در تابع setup()، سروو به پین مشخص شده (servoPin) متصل میشود که یک پین PWM است. در تابع loop()، از متد write() برای تنظیم موقعیت موتور سرو به 0، 90 و 180 درجه به ترتیب استفاده میشود و هر بار با فاصلهای برابر با 1 ثانیه منتظر میمانیم.
#include <Servo.h>
Servo mg995Servo; // ایجاد شیء سروو
const int servoPin = 9; // متصل کردن سیم سیگنال موتور سرو به این پین
void setup() {
mg995Servo.attach(servoPin); // متصل کردن سروو به پین مشخص شده
}
void loop() {
// حرکت دادن موتور سرو به 0 درجه (حداقل موقعیت)
mg995Servo.write(0);
delay(1000); // صبر برای 1 ثانیه
// حرکت دادن موتور سرو به 90 درجه (وسط موقعیت)
mg995Servo.write(90);
delay(1000); // صبر برای 1 ثانیه
// حرکت دادن موتور سرو به 180 درجه (حداکثر موقعیت)
mg995Servo.write(180);
delay(1000); // صبر برای 1 ثانیه
}
در این کد که برای میکروپایتون نوشته شده است، ماژولهای مورد نیاز "machine" را وارد کرده و یک شیء PWM برای موتور سرو ایجاد میکنیم.فرکانس PWM به 50 هرتز تنظیم میشود که برای موتورهای سرو معمولی استفاده میشود.تابع set_angle(angle) زاویهای به صورت درجه را میگیرد و آن را به دوره کار متناظر تبدیل میکند که سپس برای کنترل موقعیت موتور سرو استفاده میشود. مقادیر دوره کار (26 تا 128) بسته به موتور سرو خاص شما ممکن است متغیر باشند، بنابراین ممکن است نیاز به تنظیم آنها برای مطابقت با محدوده موتور سرو MG995 داشته باشید.حلقه در انتهای کد با استفاده از تابعها و زمانها، موتور سرو را به زوایا مختلف (0، 90 و 180 درجه) به ترتیب حرکت میدهد.
from machine import Pin, PWM
import time
servo_pin = 4 # شماره پین به کار رفته برای اتصال سیم سیگنال موتور سرو
servo_pwm = PWM(Pin(servo_pin)) # ایجاد یک شیء PWM
servo_pwm.freq(50) # تنظیم فرکانس PWM به 50 هرتز (معمولاً برای موتورهای سرو)
def set_angle(angle):
duty_cycle = int(((angle / 180) * 102) + 26) # تبدیل زاویه به دوره کار (محدوده: 26 - 128)
servo_pwm.duty(duty_cycle)
# تست موتور سرو با حرکت دادن آن به زوایای مختلف
while True:
set_angle(0) # حرکت به 0 درجه
time.sleep(1) # صبر برای 1 ثانیه
set_angle(90) # حرکت به 90 درجه
time.sleep(1) # صبر برای 1 ثانیه
set_angle(180) # حرکت به 180 درجه
time.sleep(1) # صبر برای 1 ثانیه
مشخصات
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم