وسایل رباتیک مخصوص ساخت ربات
در علم رباتیک با استفاده از ترکیب چند قطعه و المان مکانیکی در کنار بردهای الکترونیکی، ربات ساخته میشود. وسایل رباتیک شامل انواع قطعات فلزی، پلاستیکی و مکانیکی، شاسی، چرخ و تایر، گیربکس و انواع موتور و چرخ دنده مخصوص ساخت ربات Robot است. همگی این وسایل رباتیک در فروشگاه رباتیک دانشجو کیت قابل تهیه هستند. چرخ رباتیک ، المان رباتیک، قطعات مکانیکی رباتیک ، پولی و تسمه، انواع چرخ دنده مخصوص ساخت ربات از جنس پلاستیک و فلزی را در کنار هم مقایسه و بررسی کنید. فروشگاه رباتیک دانشجو کیت فروشگاه عظیم و قدیمی در زمینه ارایه محصولات الکترونیک و رباتیک در ایران، قبل از خرید میتوانید از قسمت نظرات همان کالا سوالاتتان را مطرح کنید. قطعات رباتیک از جنس مرغوب برای ساخت ربات دانشجویی و ربات دانش آموزی فراهم شدهاند.
خرید وسایل رباتیک برای ساخت ربات
برای ساخت انواع ربات به وسایل ساخت ربات نیاز است. از انواع سازههای پلاستیکی و فلزی گرفته تا موتور گیربکس دار مخصوص ساخت ربات در کنار هم قرار میگیرند. ما در فروشگاه رباتیک دانشجو کیت تلاش کردهایم، انواع وسایل رباتیک و قطعات رباتیک را برای ساخت ربات حرفهای در اختیار علاقمندان و متخصصان رباتیک قرار دهیم. فروشگاه لوازم رباتیک دانشجو کیت در اصفهان و تهران فعالیت میکند. خرید وسایل رباتیک بسیار ساده و در دسترس همگان قرار دارد. کافیست کالای مورد نظرتان را به سبد خرید اضافه کنید. اگر در خصوص وسایل ربات سوال فنی دارید، کارشناسان دانشجو کیت از طریق پرتال پشتیبانی با شما در ارتباط خواهند بود. قطعات رباتیک پر مصرف از جمله انواع المان پلاستیکی ساخت ربات، انواع شاسی و انواع چرخ و تایر رباتیک، همگی در این شاخه قرار دارند. قطعات رباتیک شامل موتور، پیچ و مهره و ملخ و پروانه پلاستیک در دسترس همگی قرار دارند. کیت رباتیک هم از جمله کالاهایی است که برای آموزش ساخت ربات مورد توجه قرار دارند.
انواع وسایل ساخت رباتیک در دانشجو کیت
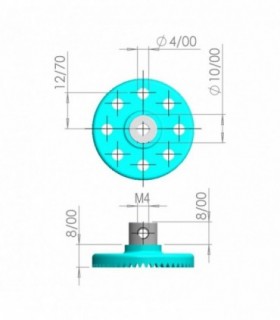
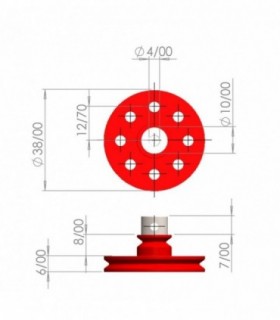
المان و سازه رباتیک
پروانه و ملخ رباتیک
مته، سه نظام و فرز
شاسی ربات Robot
انواع دسته کنترل
فن و دمنده هوا
بلبرینگ و یاتاقان
انواع فیلامنت
انواع گیربکس
پولی و تسمه
پیچ و مهره
چرخ و تایر
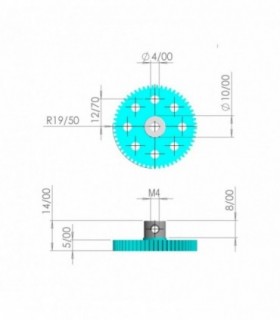
چرخ دنده
کوپلینک