






توجه: اطلاعات و جزئیات تصاویر ملاک انتخاب کالا نیستند.
توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
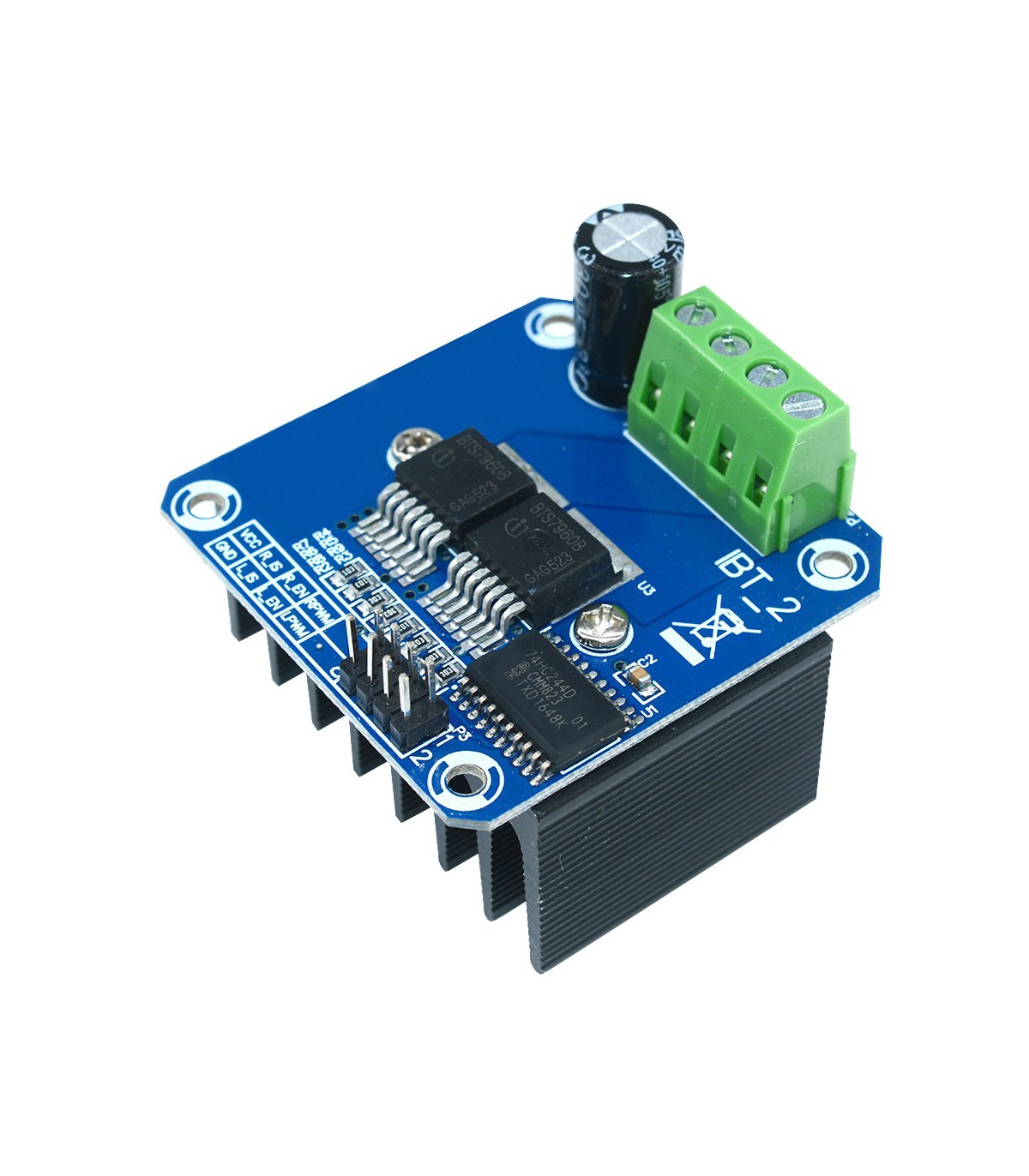
ماژول درایور BTS7960 یک ماژول قدرتمند است که برای کنترل موتورهای DC و استپر موتورها با جریان بالا طراحی شده است. این ماژول از جریان حداکثر 43 آمپر پشتیبانی میکند و برای کاربردهایی که نیاز به قدرت و دقت بالا دارند مناسب است.ماژول BTS7960 دارای دو کانال است که هر کانال به عنوان یک H-bridge عمل میکند. این H-bridgeها اجازه میدهند تا جهت چرخش موتورها را کنترل کنید و از طریق کنترل پالسها (PWM) میتوانید سرعت موتور را تنظیم کنید.درایور استپر موتور 43 آمپری BTN7960، یک ماژول بسیار کاربردی در جهت کنترل استپر موتورهاست. این ماژول دارای بازه ولتاژ 5 الی 27 ولت بوده که تا 43 آمپر جریان در خروجی را می تواند تحمل کند.
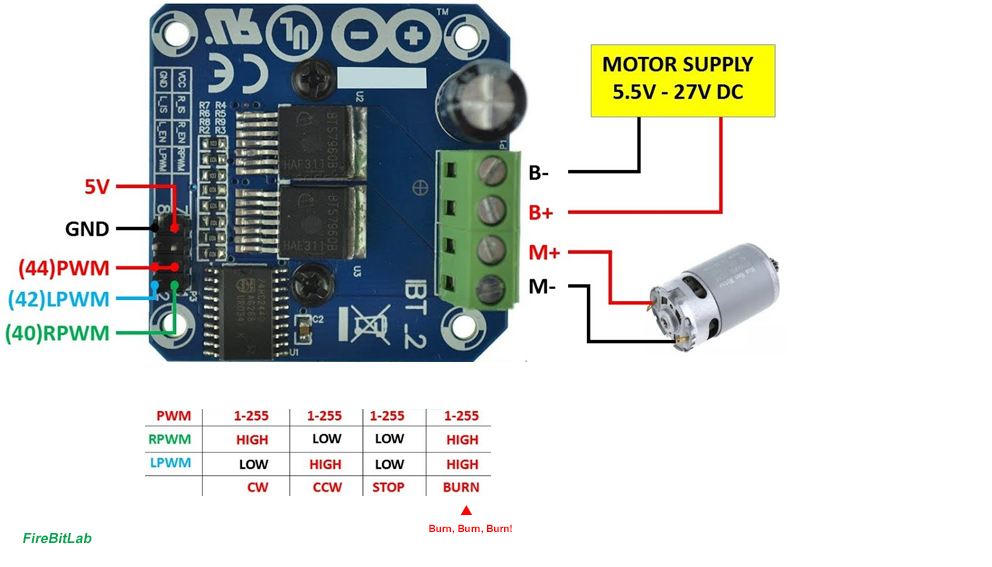
ماژول درایور موتور BTS7960 دارای دو کانال H-bridge برای کنترل دو موتور به طور مستقل میباشد. هر کانال دارای ترتیب پینهای زیر است.
برای کانال 1:
برای کانال 2:
جهت راه اندازی استپر درایور موتور BTN7960 با آردوینو از کتابخانه Stepper استفاده میکنیم. در این کد، از کتابخانه "Stepper" برای ایجاد یک شیء به نام "myStepper" استفاده میکنیم. این شیء "myStepper" با تعداد گامها برای یک دور کامل و چهار پین درایور موتور متصل به آردوینو ایجاد میشود (در این مثال پینها به ترتیب 8، 9، 10 و 11 است).تابع "setSpeed" سرعت چرخش موتور استپر را در دور در دقیقه (RPM) تنظیم میکند. میتوانید این مقدار را تغییر دهید تا سرعت موتور تغییر کند.در تابع "loop"، موتور یک دور به سمت ساعتگردان چرخش میکند و سپس یک دور به سمت عقربههای ساعتگردان چرخش میکند. بین این دو حرکت نیز یک تاخیر کوتاه وجود دارد تا به موتور زمان داده شود تا حرکت کند.
#include <Stepper.h>
// تعیین تعداد گامها برای یک دور کامل موتور استپر شما
const int stepsPerRevolution = 200;
// ایجاد یک شیء استپر با تعداد گامها و پینهای درایور موتور
Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11);
void setup() {
// تنظیم سرعت موتور (میتوانید این مقدار را تغییر دهید تا سرعت موتور تغییر کند)
myStepper.setSpeed(100); // در دور در دقیقه (RPM)
}
void loop() {
// یک دور موتور به سمت ساعتگردان چرخش میکند
myStepper.step(stepsPerRevolution);
// منتظر یک تاخیر کوتاه باشید (میتوانید این مقدار را تغییر دهید تا زمان تاخیر تغییر کند)
delay(1000);
// یک دور موتور به سمت عقربههای ساعتگردان چرخش میکند
myStepper.step(-stepsPerRevolution);
// منتظر یک تاخیر کوتاه باشید، سپس عمل را تکرار کنید (میتوانید این مقدار را تغییر دهید تا زمان تاخیر تغییر کند)
delay(1000);
}
جهت راه اندازی درایور استپر موتور BTN7960 با میکروپایتون از ماژول "machine" در میکروپایتون برای کنترل موتور استفاده میشود. پینهای درایور موتور (IN1، IN2، IN3، IN4) به عنوان شیء پین تعریف میشوند و به عنوان پین خروجی مقداردهی اولیه میشوند.توابع step_forward() و step_backward() یک گام در جهت مشخص شده را انجام میدهند. این توابع پینهای درایور موتور را بر اساس توالی مورد نیاز برای حرکت یک گام موتور کنترل میکنند.توابع rotate_clockwise() و rotate_counterclockwise() موتور استپر را به ترتیب به سمت عقربههای ساعتگردان و ساعتگردان برای یک دور کامل چرخانده و توالی حرکتها را تکرار میکنند.
from machine import Pin
import utime
# تعداد گامها برای یک دور کامل موتور استپر شما
steps_per_revolution = 200
# ایجاد شیء پین برای پینهای درایور موتور
motor_in1 = Pin(8, Pin.OUT)
motor_in2 = Pin(9, Pin.OUT)
motor_in3 = Pin(10, Pin.OUT)
motor_in4 = Pin(11, Pin.OUT)
# تابع برای انجام یک گام در جهت مشخص شده
def step_forward():
motor_in1.on()
motor_in2.off()
motor_in3.on()
motor_in4.off()
utime.sleep_us(1000) # در صورت نیاز زمان تاخیر را تغییر دهید
motor_in1.off()
motor_in2.on()
motor_in3.on()
motor_in4.off()
utime.sleep_us(1000) # در صورت نیاز زمان تاخیر را تغییر دهید
motor_in1.off()
motor_in2.on()
motor_in3.off()
motor_in4.on()
utime.sleep_us(1000) # در صورت نیاز زمان تاخیر را تغییر دهید
motor_in1.on()
motor_in2.off()
motor_in3.off()
motor_in4.on()
utime.sleep_us(1000) # در صورت نیاز زمان تاخیر را تغییر دهید
# تابع برای انجام یک گام در جهت مخالف
def step_backward():
motor_in1.on()
motor_in2.off()
motor_in3.off()
motor_in4.on()
utime.sleep_us(1000) # در صورت نیاز زمان تاخیر را تغییر دهید
motor_in1.off()
motor_in2.on()
motor_in3.off()
motor_in4.on()
utime.sleep_us(1000) # در صورت نیاز زمان تاخیر را تغییر دهید
motor_in1.off()
motor_in2.on()
motor_in3.on()
motor_in4.off()
utime.sleep_us(1000) # در صورت نیاز زمان تاخیر را تغییر دهید
motor_in1.on()
motor_in2.off()
motor_in3.on()
motor_in4.off()
utime.sleep_us(1000) # در صورت نیاز زمان تاخیر را تغییر دهید
# چرخش موتور به سمت عقربههای ساعتگردان برای یک دور کامل
def rotate_clockwise():
for _ in range(steps_per_revolution):
step_forward()
# چرخش موتور به سمت ساعتگردان برای یک دور کامل
def rotate_counterclockwise():
for _ in range(steps_per_revolution):
step_backward()
# نمونه استفاده
while True:
rotate_clockwise()
utime.sleep(1) # در صورت نیاز زمان تاخیر را تغییر دهید
rotate_counterclockwise()
utime.sleep(1) # در صورت نیاز زمان تاخیر را تغییر دهید
مشخصات
دستگاه FMB920 دادههای موقعیت و وضعیت خودرو را ارسال میکند. برای مشاهده این دادهها باید دستگاه به سرور و اپلیکیشن یا سامانه ردیابی متصل شود. در صورت تمایل میتوانید به هنگام خرید گزینهی به همراه اپلیکیشن را انتخاب کنید.
بله، اما این حالت بیشتر برای کاربران فنی مناسب است. کاربر عمومی برای مشاهده خودرو روی نقشه، دریافت گزارش و مدیریت هشدارها معمولا به اپلیکیشن یا پنل ردیابی نیاز دارد.
امکان راه اندازی چند سنسور DHT با ESP8266 با استفاده از MicroPython وجود دارد. سنسورهای DHT با پروتکل دیجیتال و از طریق پایههای GPIO قابل اتصال به میکروکنترلرها هستند.
برای ساخت یک سیستم کنترل دما با برد میکروکنترلر ESP32، به موارد زیر نیاز دارید:
یک برد میکروکنترلر ESP32
یک سنسور دما مثل DHT DS18B20
یک المان سرد کننده
با استفاده از کتابخانه DHT.h، میتوانید از سنسور دما برای خواندن دمای محیط استفاده کنید. سپس، میتوانید از این دما برای کنترل المان گرمایشی یا سرمایشی استفاده کنید.
در خصوص برنامه نویسی از کتابخانه DHT و در صورت نیاز کتابخانه وای فای برای ارسال دادهها به پلتفرم IoT باید استفاده کنید.
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم