





توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
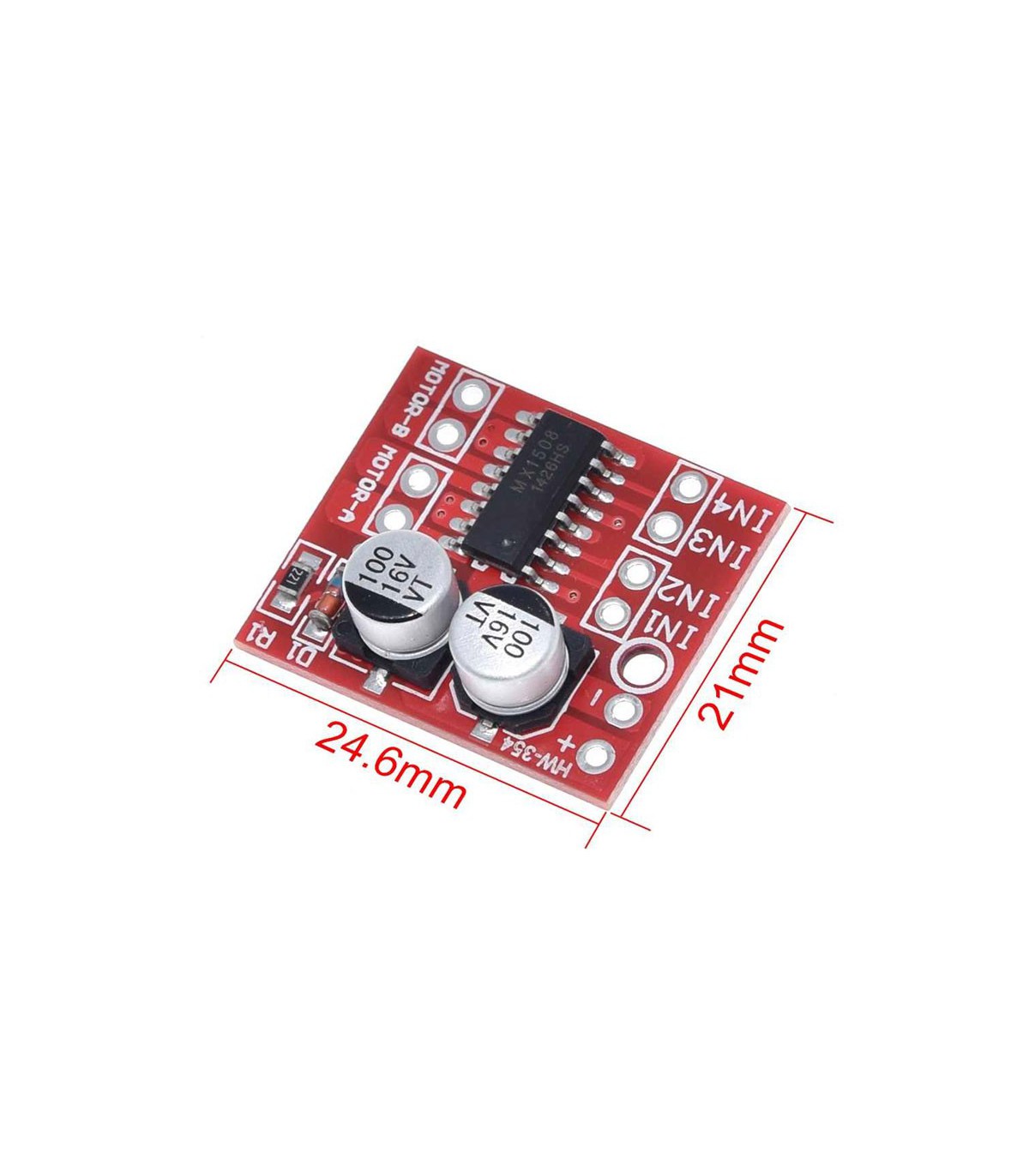
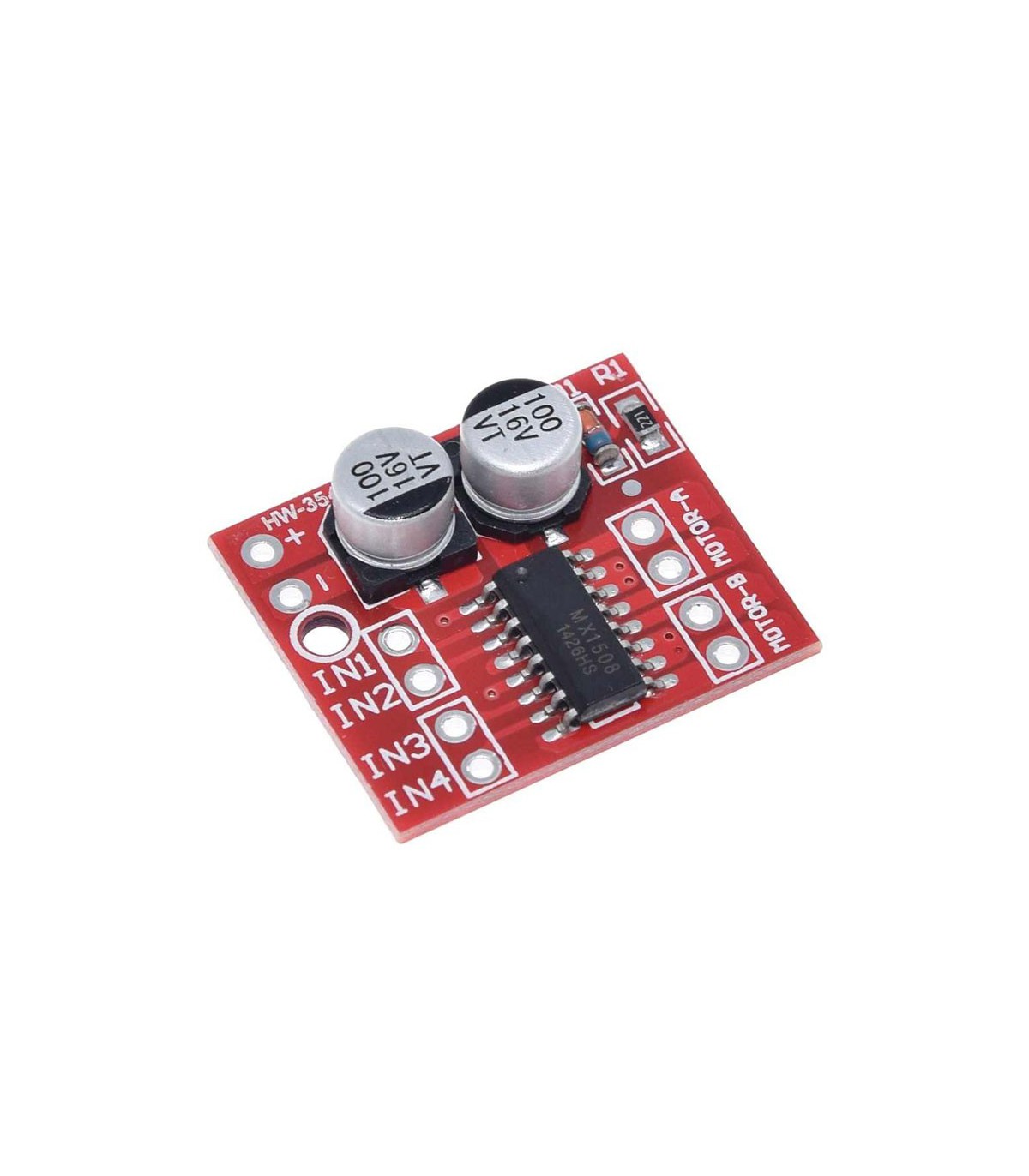
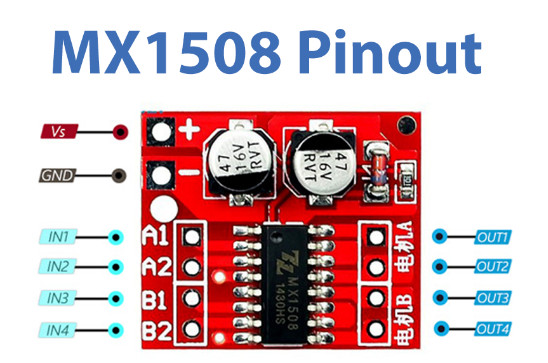
ماژول MX1508 یک موتور درایور دوگانه است که برای کنترل دو موتور DC کوچک در رباتیک و پروژههای الکترونیکی دیگر استفاده میشود. این ماژول دو کانال موتور مستقل را پشتیبانی میکند که به عنوان کانال A و B نامگذاری شدهاند و به شما اجازه میدهد دو موتور DC را به صورت همزمان کنترل کنید.MX1508 میتواند با ولتاژهای موتور گستردهای کار کند که بین 2 ولت تا 10 ولت است. برای رانندگی موتورهای کوچک مانند موتورهای استفاده شده در اتومبیلهای اسباببازی یا رباتهای کوچک مناسب است.
هر کانال موتور MX1508 میتواند جریان مستمر حداکثر حدود 1.5 آمپر را تحمل کند. با این حال، جریان تا 2.5 آمپر برای مدتهای کوتاه قابل تحمل است. این ماژول دارای یک رابط کنترل ساده است که سیگنالهای ورودی دیجیتال را از یک میکروکنترلر یا هر مدار کنترلی سازگار دیگر قبول میکند. از دو پین کنترل دیجیتال برای هر کانال موتور استفاده میکند، یکی برای کنترل جهت (ENA و ENB) و یکی برای کنترل سرعت (ورودی PWM). MX1508 شامل ویژگیهای حفاظت داخلی مانند قطع حرارتی و حفاظت در برابر جریان بیش از حد است. این ویژگیها به جلوگیری از آسیب به ماژول و موتورهای متصل شده در شرایط نقص کمک میکنند.این ماژول با استفاده از یک ولتاژ منطقی جداگانه عمل میکند که 5 ولت است. این امکان را به شما میدهد که به راحتی با میکروکنترلرها و مدارهای دیجیتال دیگر ارتباط برقرار کنید.
در این کد، موتورها به پینهای آردوینو که با متغیرهای enA، in1، in2، enB، in3 و in4 تعریف شدهاند، متصل میشوند. شما میتوانید این اختصاص پینها را مطابق با سیمکشی خاص خود تغییر دهید.این کد عملیات کنترل اولیه موتور مانند حرکت به جلو، به عقب و توقف را نشان میدهد. شما میتوانید سرعت موتورها را با تغییر مقادیر ارسالی به تابع analogWrite() برای پینهای enA و enB تنظیم کنید.
// موتور A
int enA = 9; // پین ENA
int in1 = 8; // پین IN1
int in2 = 7; // پین IN2
// موتور B
int enB = 6; // پین ENB
int in3 = 5; // پین IN3
int in4 = 4; // پین IN4
void setup() {
// تنظیم پینهای کنترل موتور به عنوان خروجی
pinMode(enA, OUTPUT);
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(enB, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
}
void loop() {
// حرکت موتور A به جلو
digitalWrite(in1, HIGH);
digitalWrite(in2, LOW);
analogWrite(enA, 200); // تنظیم سرعت (0-255) با استفاده از PWM
// حرکت موتور B به عقب
digitalWrite(in3, LOW);
digitalWrite(in4, HIGH);
analogWrite(enB, 150); // تنظیم سرعت (0-255) با استفاده از PWM
delay(2000); // صبر برای 2 ثانیه
// توقف موتورها
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
delay(1000); // صبر برای 1 ثانیه
// حرکت موتور A به عقب
digitalWrite(in1, LOW);
digitalWrite(in2, HIGH);
analogWrite(enA, 180); // تنظیم سرعت (0-255) با استفاده از PWM
// حرکت موتور B به جلو
digitalWrite(in3, HIGH);
digitalWrite(in4, LOW);
analogWrite(enB, 220); // تنظیم سرعت (0-255) با استفاده از PWM
delay(2000); // صبر برای 2 ثانیه
// توقف موتورها
digitalWrite(in1, LOW);
digitalWrite(in2, LOW);
digitalWrite(in3, LOW);
digitalWrite(in4, LOW);
delay(1000); // صبر برای 1 ثانیه
}
مشخصات
دستگاه FMB920 دادههای موقعیت و وضعیت خودرو را ارسال میکند. برای مشاهده این دادهها باید دستگاه به سرور و اپلیکیشن یا سامانه ردیابی متصل شود. در صورت تمایل میتوانید به هنگام خرید گزینهی به همراه اپلیکیشن را انتخاب کنید.
بله، اما این حالت بیشتر برای کاربران فنی مناسب است. کاربر عمومی برای مشاهده خودرو روی نقشه، دریافت گزارش و مدیریت هشدارها معمولا به اپلیکیشن یا پنل ردیابی نیاز دارد.
امکان راه اندازی چند سنسور DHT با ESP8266 با استفاده از MicroPython وجود دارد. سنسورهای DHT با پروتکل دیجیتال و از طریق پایههای GPIO قابل اتصال به میکروکنترلرها هستند.
برای ساخت یک سیستم کنترل دما با برد میکروکنترلر ESP32، به موارد زیر نیاز دارید:
یک برد میکروکنترلر ESP32
یک سنسور دما مثل DHT DS18B20
یک المان سرد کننده
با استفاده از کتابخانه DHT.h، میتوانید از سنسور دما برای خواندن دمای محیط استفاده کنید. سپس، میتوانید از این دما برای کنترل المان گرمایشی یا سرمایشی استفاده کنید.
در خصوص برنامه نویسی از کتابخانه DHT و در صورت نیاز کتابخانه وای فای برای ارسال دادهها به پلتفرم IoT باید استفاده کنید.
| نام فروشنده | زمان ارسال | موجودی | قیمت | خرید |
|---|---|---|---|---|
|
الکترونیک دانشجو کیت
|
آماده ارسال | 7 | 166,800 تومان |
166,800 تومان
افزودن به سبد خرید
|
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم