مشاهده همه محصولات
محصولی پیدا نشد

مرجع کاربردی MATLAB Simscape Multibody
درباره کتاب مرجع کاربردی MATLAB Simscape Multibody
بیتردید ماژول Simscape Multibody یکی از معروفترین و پرکاربردترین ماژولهای شبیهساز و تحلیل سیستمهای دینامیکی میان مهندسان مکانیک، کنترل و رباتیک است و این کتاب با هدف آموزش این نرمافزار در قالب تکنیکهای مهم وکاربردی نگارش یافته است.
برای بررسی و تحلیل در محیط این ماژول نیاز به دانستن برخی مفاهیم اساسی است که باید معرفی شوند. بدین منظور نویسندگان این کتاب را به دو بخش تقسیم کردهاند. در بخش اول، خوانندگان با مفاهیمی مانند سینماتیک، دینامیک و ... آشنا میشوند. در بخش دوم با طرح مسایلی در نسل اول و نسل دوم با بلوکهای تعبیهشده در Simscape Multibody آشنا خواهند شد.
سعی شده است مسایل یکسانی برای نسل اول و دوم استفاده شود تا خوانندگان بتوانند بهطور کامل تفاوت میان این دو نسل را درک کنند و با توجه به مساله خود بتوانند انتخاب درستی برای تحلیل هر چه بهتر و دقیقتر داشته باشند.
در این اثر با دیدگاه کاربردی و بهطور عملی با مفاهیم زیر آشنا میشوید:
• مدلسازی رباتها و مکانیزمها در محیط مولتیبادی نسل اول و دوم از نرمافزار متلب ؛
• تحلیل رباتهای سری و موازی ؛
• آشنایی با مفاهیم سینماتیک و دینامیک مستقیم و معکوس رباتها ؛
• آنالیز نیرو و ژاکوبین رباتها ؛
• ارتباط با نرمافزار سالیدورکس ؛
• ارتباط با دیگر کتابخانههای موجود در نرمافزار متلب.
سرفصلهای کتاب مرجع کاربردی MATLAB Simscape Multibody
فصل اول: ربات سری دو لینکی صحفهای
فصل دوم: ربات سری دو لینکی فضایی
فصل سوم: ربات چهار میلهای
فصل چهارم: ربات موازی 2-PRR
پیوست: تولبد مسیر در رباتها
DKP - 20042122
مشخصات
- نویسنده
- ايمان كاردان، سيد نادر نبوي، هادي كلاني
- قطع کتاب
- وزيري
- نوبت و سال چاپ
- 1
- سال چاپ
- 97
- تعداد صفحات
- 336
- شابک
- 9786003072091
خریداران این محصول، این کالاها را نیز خریده اند:




توجه: عکس این کالا فقط برای نمایش نوع باتری است. اطلاعات روی تصویر ملاک انتخاب نیست. عدد روی باتری 903480




محصولات مرتبط


250,000 تومان
كتاب حاضر شامل تشریح كامل مسائل فصول 1 تا 10 و گزیدهای از مسائل فصول 11 و 12 میباشد.
200,000 تومان
کتاب حاضر به حل مسایل کتاب (الکترونیک لیزر) میپردازد که در مقطع کارشناسی و کارشناسی ارشد رشتهی فیزیک ارائه میگردد.






ویژگیهای فیزیکی
قطع کتاب
وزيري
تعداد صفحات
336
ویژگی های کتاب
نویسنده
ايمان كاردان، سيد نادر نبوي، هادي كلاني
نوبت و سال چاپ
1
سال چاپ
97
شابک
9786003072091


1,500,000 تومان
توجه: ماژول بلوتوث در این یک بسته به موجودی انبار متفاوت است.

13,999,000 تومان
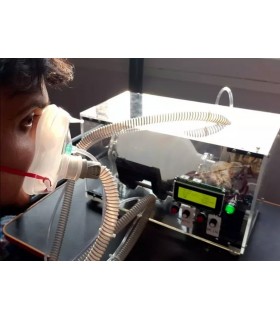
این درواقع یک پروژه آموزشی ساخت دستگاه تنفس مصنوعی یا ونیلاتور با استفاده از مدل برد یونو است. که با اندازه گیری اکسیژن خون با یک منبع مصنوعی به بیمار تنفس میدهد.


2,950,000 تومان
در این کیت 5 مدار آموزشی کنترل سطح مخزن آب ،آبیاری خودکار گل و باغچه ،دزدگیر منزل ،تهویه خودکار ،لامپ هوشمند بصورت کاردستی الکترونیک برای دانش آموزان و بدون نیاز به لحیم کاری و تجهیزات خاص به همراه DVD آموزش ویدئویی...

9,910,000 تومان
ماکت یک کیت مونتاژ شده مجموعه کامل و آماده جهت آموزش و یادگیری هوشمندسازی منازل و ساختمانهاست، با استفاده از اپلیکیشن بلوتوث موبایل سنسورهای ماکت را فعال میکنید و عملکرد هر ماژول بصورت آلارم هشدار بازر یا نمایش بر روی...

29,330,000 تومان
توجه: فایلهای آموزش مقدماتی و پایهای کار با ماژولهای کیت اینترنت اشیا پس از خرید قابل دانلود هستند.

پیشنهاد ویژه مدت محدود
3,464,000 تومان
6,064,000 تومان
دوره آموزش برخط آردوینو توسط لیدی پای ضبط شده و در صورت خرید گزینه «آموزش ویدیویی آفلاین» دسترسی به فایل آموزشی برای شما فعال میشود. که شامل پشتیبانی هم هست.