توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر

رباتهای مسیریاب به عنوان یکی از نمایانگرهای پیشرفت فناوری در عرصههای مختلف، از جمله صنعت، پزشکی، و حتی زندگی روزمره، به شدت به توجه و اهمیت برخوردهاند. این دستگاهها با قابلیت حرکت و مکانیابی خود، امکاناتی فراوان برای اتوماسیون و افزایش کارایی فرآیندها فراهم میکنند. در این راستا، انتخاب میانافزار مناسب برای ساخت ربات از اهمیت ویژهای برخوردار است. برد آردوینو با ویژگیهای خاص خود، از جمله سهولت برنامهنویسی، انعطاف پذیری، و پشتیبانی اجتماعی قوی، به عنوان یک میانافزار اصلی برای ساخت ربات مسیریاب، انتخابی مناسب و توجیهپذیر محسوب میشود. در این بلاگ، به بررسی جزئیات این توجیه و چگونگی ساخت یک ربات مسیر یاب با استفاده از برد آردوینو خواهیم پرداخت تا افراد علاقهمند را با فرایند ساخت و کارکرد این دستگاه هوشمند آشنا سازیم.
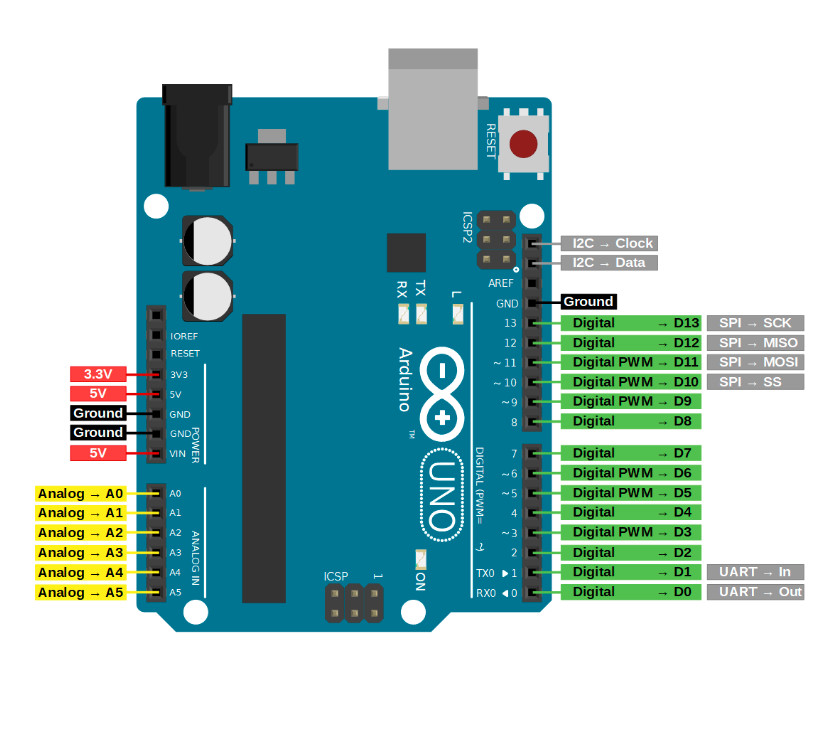
برد آردوینو به عنوان یک پلتفرم برنامهنویسی متنباز معروف است. این برد کوچک اما قدرتمند، در زمینههای گوناگونی از جمله الکترونیک، رباتیک و اینترنت اشیا و... استفاده میشود. ویژگیهای برجسته آردوینو شامل سهولت در استفاده، توانمندی برنامهریزی با زبانهای برنامهنویسی C و C++ و پشتیبانی گسترده از جامعه برنامهنویسان است. برد آردوینو با ارائه یک محیط توسعه یکپارچه (IDE)، امکان برنامهنویسی سریع و آسان را برای افراد مختلف، از مبتدی تا حرفهای، فراهم میکند. این ویژگیها از آردوینو یک انتخاب ایدهآل برای پروژههای متنوع میسازند.
در ساخت یک پروژه مسیریاب با استفاده از برد آردوینو، مجموعهای از موارد ضروری برای دستیابی به هدف مورد نظر وجود دارد. این موارد شامل سنسورها برای تشخیص محیط، موتورها برای حرکت ربات، و ماژولهای مختلفی که برای ارتباط و کنترل بخشهای مختلف پروژه لازم است، میباشد. به طور مثال، سنسورهای مسافت، دوربینها یا سنسورهای خاص میتوانند به ربات امکان نقشهبرداری و شناسایی موانع را فراهم کنند. همچنین، موتورها و الگوریتمهای کنترل حرکت میتوانند به ربات این امکان را بدهند که مسیر خود را به بهترین شکل طی کند. این لیست از موارد، ابزارهای اساسی برای ساخت یک ربات مسیریاب با کاربرد وسیع را فراهم میکند.
پیش از اقدام به ساخت ربات مسیریاب با برد آردوینو بایستی هدف نهایی را مشخص کرد. معمولا هدف نهایی در پروژه ربات مسیریاب این است که به صورت خودکار مسیرهای مختلف را شناسایی کرده و آنها را دنبال کند. این ایده، نه تنها یک چالش فنی جذاب برای علاقمندان به رباتیک و برنامهنویسی محسوب میشود، بلکه کاربردهای عملی و مفید آن در زندگی روزمره را نیز به همراه دارد. با ایجاد یک ربات مسیریاب، افراد میتوانند از این تکنولوژی برای اتوماسیون فرآیندهای مرتبط با حرکت در محیطهای داخلی یا خارجی بهرهمند شوند. این پروژه میتواند به عنوان یک راهکار هوشمند برای حمل و نقل در مکانهای عمومی، خودروهای هوشمند، یا حتی در خانهها باشد.
توجیه انتخاب این هدف بر اساس نیازمندیهای زندگی روزمره است. در دنیای امروز که تکنولوژی به سرعت پیشرفت میکند، ایجاد راهکارهای هوشمند برای اتوماسیون کارها و بهبود کیفیت زندگی امری حیاتی است. ربات مسیر یاب قادر به حرکت در محیطهای پیچیده، شناسایی مسیرها و جلوگیری از برخوردهاست، که این ویژگیها به معنای افزایش امنیت و کارایی در حرکتهای روزانه ما ترجمه میشوند. این پروژه نه تنها فرصتی برای یادگیری و تجربه در حوزههای مختلف مهندسی و برنامهنویسی ارائه میدهد، بلکه به عنوان یک نمونه کاربردی از هوش مصنوعی و رباتیک در زندگی روزمره به ارمغان میآید. با توجه به این توضیحات زمانی که یک ربات مسیریاب ساده به کمک بردهای ساده الکترونیکی به یک دانش آموز، آموزش داده میشوند. در آخر هدف نهایی دستیابی به رباتهای مسیریاب پیشرفته خواهد بود.
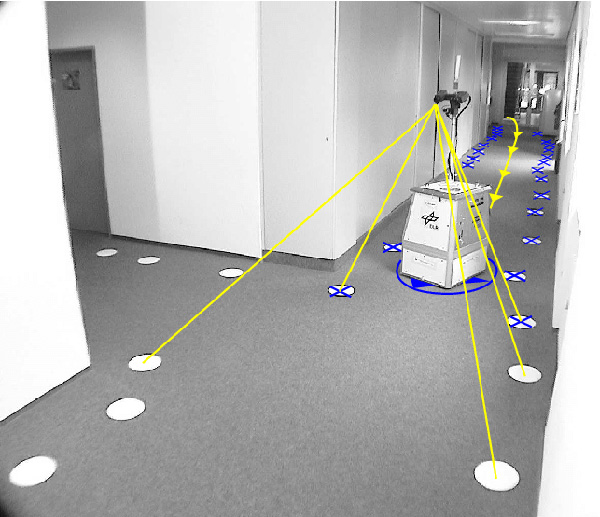
در پروژه ساخت ربات مسیریاب، نقشهبرداری یکی از عناصر کلیدی است که توسعهدهندگان باید با آن مواجه شوند. نقشهبرداری اغلب با استفاده از سنسورها یا دوربینها صورت میگیرد. سنسورها برای تشخیص فواصل و موانع اطراف ربات به کار میروند، در حالی که دوربینها تصاویر محیط را به ربات ارائه میدهند. این اطلاعات سپس توسط الگوریتمهای پیچیدهای پردازش میشوند تا یک نقشه دقیق از محیط ایجاد شود. از جمله روشهای معمول برای نقشهبرداری میتوان به SLAM (Simultaneous Localization and Mapping) اشاره کرد که توانمندی ربات را در تشخیص مکان خود در محیط و همچنین ایجاد نقشه بهروز شده از مسیرهای پیموده شده توسط آن، ارتقا میدهد.
در یک پروژه رباتیک مسیریاب حرفهای، مفهوم مسیریابی نیز اساسیترین بخش در پروژه است. مسیریابی به عنوان توانایی ربات در انتخاب و دنبال کردن مسیرهای بهینه برای حرکت از نقطه شروع به مقصد، تعریف میشود. این مفهوم بهطور گستردهای در رباتیک و هوش مصنوعی مورد استفاده قرار میگیرد. الگوریتمهای مسیر یابی با توجه به ویژگیهای محیط و اطلاعات دریافتی از نقشهبرداری، مسیرهای مناسب را برای ربات انتخاب میکنند. الگوریتمهایی چون A* یا Dijkstra از جمله محبوبترین الگوریتمهای مسیریابی هستند که به ربات کمک میکنند تا با کارآیی بالا و بدون برخورد از نقطه شروع به مقصد حرکت کند. در بلاگ سایت، صرفا این الگوریتمها را معرفی میکنیم و راجع به پیاده سازی آن روی برد آردوینو مطالبی را ارایه نمیدهیم.
برای ساخت یک ربات مسیریاب پیشرفته، تجهیزات الکترونیکی ایفای نقش حیاتی در عملکرد و کارایی ربات دارند. در بخش الکترونیکی این پروژه، انتخاب و استفاده از وسایل مناسب میتواند تأثیر بسزایی در عملکرد نهایی داشته باشد. برد آردوینو به عنوان میانافزار اصلی برای کنترل و برنامهنویسی ربات به کار میرود و با واحدهای الکترونیکی دیگر بهطور مستقیم ارتباط برقرار میکند. سنسورهای متنوعی مانند سنسورهای اولتراسونیک برای اندازهگیری فواصل، سنسورهای خط برای تشخیص خطوط یا مسیرها، و سنسورهای مغناطیسی برای شناسایی جهتها استفاده میشوند.
همچنین، موتورها و درایورهای موتور باعث حرکت و کنترل دقیق ربات میشوند. استفاده از باتریها با ظرفیت مناسب و ولتاژ مناسب نیز از اهمیت ویژه برخوردار است تا ربات بتواند به طور پایدار و مداوم حرکت کند. همچنین، ماژولهای ارتباطی مانند ماژولهای بلوتوث یا وایفای در صورت نیاز به ارتباط بیسیم جهت کنترل یا ارسال داده نیز مورد استفاده قرار میگیرند. انتخاب و استفاده از این وسایل با دقت و هوشمندانه، پروژه را به یک ربات مسیریاب پیشرفته با عملکرد بالا و قابلیتهای هوشمندانه تبدیل میکند.
زمانی که از برد آردوینو به عنوان پردازنده یک ربات مسیریاب استفاده میکنیم. طبعا در کنار آن به سنسورهایی از جمله مادون قرمز، فاصله سنج فراصوت و یا لیزر نیاز خواهید داشت.
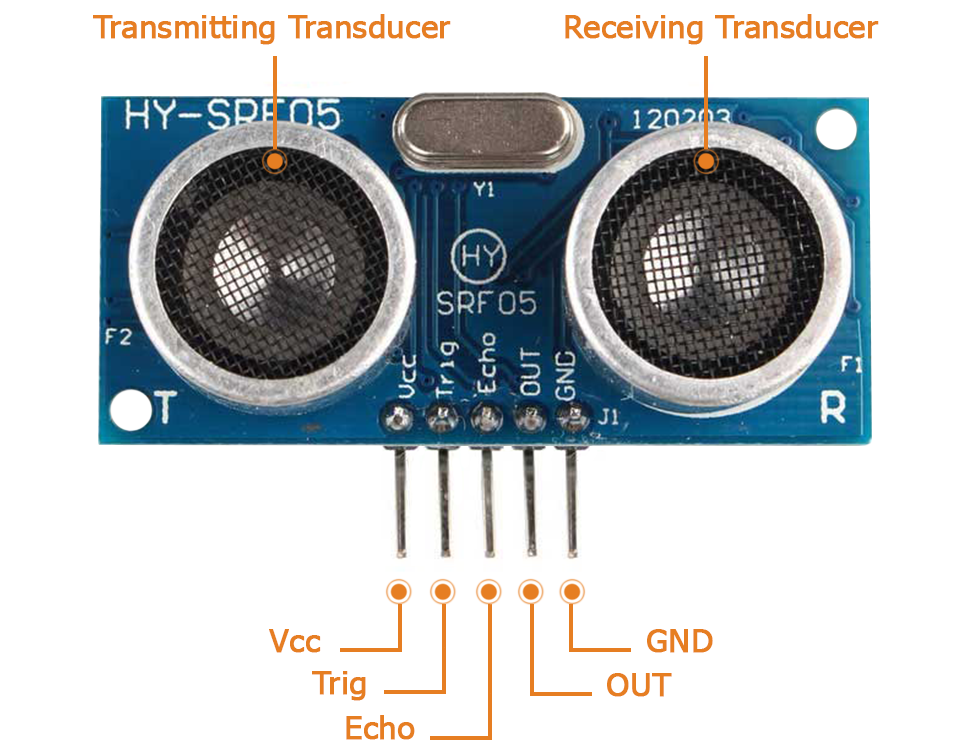
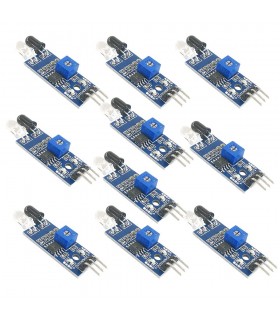
در جریان ساخت یک ربات مسیریاب، استفاده از سنسورهای مختلف امری حیاتی برای تشخیص محیط و مسیر ربات است. یکی از سنسورهای پرکاربرد در این حوزه، سنسورهای اولتراسونیک هستند. این سنسورها با ارسال امواج صوتی و دریافت بازتاب آن از اطراف، قادر به تعیین فواصل و اشیا در محیط هستند. همچنین، سنسورهای مغناطیسی به راحتی قابل اتصال به برد آردوینو بوده و توانایی تشخیص جهت و مسیرهای مغناطیسی را دارند. از دیگر سنسورهای مورد استفاده در پروژه، سنسورهای خط (Line Sensor) هستند که قابلیت تشخیص خطوط یا مسیرهای رنگی را دارند. این سنسورها میتوانند در مسیریابی ربات به عنوان راهنمایی برای جلوگیری از انحراف از مسیر مورد استفاده قرار گیرند.
برای اتصال و استفاده از این سنسورها در پروژه، نیاز به یک اتصال سیمی دقیق به برد آردوینو داریم. این اتصالات معمولا به وسیله کابلها و سرپیچهای مخصوص انجام میشوند. به عنوان مثال، سنسورهای اولتراسونیک با اتصال به پایههای دیجیتال برد آردوینو قابل استفاده هستند و اطلاعات فاصله را به برنامهنویس ارائه میدهند. سنسورهای مغناطیسی نیز با اتصال به پایههای آنالوگ یا دیجیتال، اطلاعات مغناطیسی را به ربات ارائه میدهند. برنامهنویس ربات میتواند با استفاده از این اطلاعات و اندازهگیریهای دریافتی، الگوریتمهای مناسبی را برای کنترل حرکت ربات و مسیر یابی آن تعریف کنند.
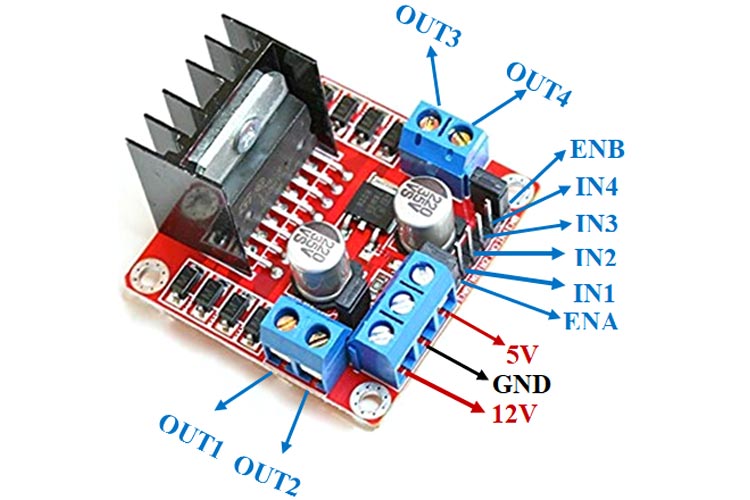
در پروژه ربات مسیریاب، کنترل موتورها به منظور دستیابی به حرکت دقیق و کنترل شده ربات از اهمیت ویژهای برخوردار است. برای حرکت ربات به جلو، عقب، چپ یا راست، از موتورها استفاده میشود که نیاز به یک سیستم کنترل دقیق دارند. در این پروژه، اتصال موتورها به برد آردوینو از طریق درایور موتور انجام میشود. این درایورها امکان کنترل سرعت و جهت چرخش موتورها را فراهم میکنند. با تغییر ولتاژ و جهت اعمال شده به موتورها، ربات میتواند به صورت دقیق حرکت کرده و مسیر مورد نظر را دنبال کند.
استفاده از الگوریتمهای کنترل حرکت نیز برای بهبود عملکرد ربات حیاتی است. الگوریتمهای کنترل حرکت بر اساس اطلاعات دریافتی از سنسورها و نقشهبرداری، تصمیمگیری در مورد حرکت بهینه را بر عهده دارند. از الگوریتمهایی چون PID (Proportional-Integral-Derivative) برای کنترل سرعت و جهت موتورها استفاده میشود. این الگوریتم با تحلیل خطاهای حاصل از اختلاف بین موقعیت مورد نظر و وضعیت فعلی ربات، به تنظیم سرعت و جهت بهینه موتورها میپردازد.
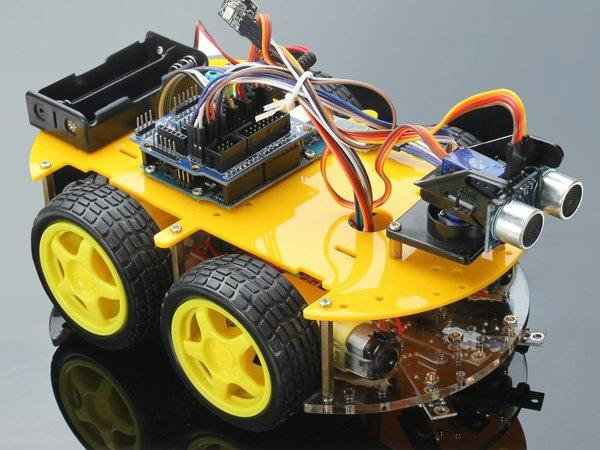
در بخش مکانیکی ربات مسیریاب پیشرفته، انتخاب و استفاده از وسایل مکانیکی مناسب تاثیر زیادی بر عملکرد و پایداری ربات دارد. استفاده از چهار چرخ با سیستم معلق و ماشینآلات حرفهای برای حرکت ربات میتواند دقت و ثبات حرکت را افزایش دهد. استفاده از موتورها و گیربکسهای با کیفیت به اندازه کافی مهم است تا حرکت ربات با دقت و قدرت انجام شود.
همچنین، ساختار بدنه ربات از جنس مواد سبک و مقاوم مانند آلومینیوم یا پلاستیک مقاوم ترموپلاستیک باعث کاهش وزن و افزایش حرکت آسان ربات میشود. سیستم مکانیکی ربات باید به گونهای طراحی شود که از لرزش و نوسانات کاسته شود و از پایداری بالا برخوردار باشد.
در این بخش، انتخاب و استفاده از مواد، قطعات، و سیستمهای مکانیکی با دقت و تعادل، در نهایت، ربات مسیریاب پیشرفته را به یک ساختار مکانیکی با کارایی و قابلیت حرکت بالا تبدیل خواهد کرد. همچنین، مدیریت اندازه و وزن قطعات مکانیکی نیز از اهمیت زیادی برخوردار است تا ربات بتواند با آسانی در محیطهای مختلف حرکت کرده و مسیرهای خود را با دقت دنبال کند.
آموزش برنامهنویسی برای آردوینو با استفاده از محیط توسعه آردوینو (Arduino IDE) یکی از اساسیترین بخشها در راهاندازی پروژههای الکترونیکی و رباتیک است. این محیط توسعه بسیار ساده و کاربرپسند طراحی شده است تا همه افراد، از مبتدی تا حرفهای، بتوانند به راحتی با آن کار کنند. به عبارتی برد آردوینو فقط یک کارایی خاص ندارد و با توجه به برنامه نویسی انجام شده برای آن میتواند بینهایت کاربرد داشته باشد. با توجه به سنسورهای به کار رفته در ربات مسیریاب میبایست برنامهای مناسب برای برد آردوینو نوشته شود. برنامه نویسی آردوینو یک مهارت منحصر به فرد است. با توجه به ماهیت C برنامه بسیار مهم است که چطور این برنامه نوشته شود، در غیر این صورت با مشکلاتی از جمله کمبود حافظه پردازش مواجه خواهید شد.
بنابراین براساس سنسورهایی که در ربات مسیریاب به کار رفته است و نیازمندی ربات مسیریاب بایستی اقدام به برنامه نویسی کنید. ربات مسیریاب پیشرفته با آردوینو میتواند بسیار جذاب و منحصر به فرد باشد. توسط برنامه نویسی برای ربات پیشرفته آردوینو اقدامات متنوعی را میتوان پیاده سازی کرد. از جمله اینکه اتصال به سرورهای مختلف و یا استفاده از هوش مصنوعی و یا ایجاد یک شبکه عصبی مخصوص ربات تا آنرا هوشمندتر مدیریت کرد.
در ساخت ربات مسیریاب، ممکن است با برخی اشتباهات رایج مواجه شوید که میتوانند به کارایی پروژه شما تأثیر بگذارند. در ادامه برخی از این اشتباهات رایج را بررسی میکنیم.
برای جلوگیری از این اشتباهات، اهمیت آموزش، برنامهریزی دقیق، تستهای مستمر، و ارتباط فعال با جامعه سازندگان و هواشناسان الکترونیکی و رباتیک بسیار مهم است.
رباتهای مسیریاب یکی از جذابترین رباتها برای آموزش هستند. همچنین رباتهای مسیریاب در صنایع مختلف و کاربریهای مختلف استفاده میشوند. از اینرو آگاهی نسبت به آنها بسیار اهمیت دارد. در این پست سعی کردیم که توضیحاتی جامع برای ساخت ربات مسیریاب پیشرفته ارایه کنیم. این رباتها معمولا به بردهای میکروکنترلری نیاز دارند تا بتوانند عملکردی دقیق داشته باشند. در این پست راجع به برد آردوینو در ربات مسیریاب مطالبی را ارایه کردیم. هدف ما ارتقا دانش کاربران فارسی زبان است. همچنین افرادی که علاقمند به ساخت ربات هستند میتوانند قدمهای بعدی را برای ساخت ربات جدید از طریق افزایش آگاهی بردارند. بنابراین اگر این پست برای شما مفید بود و به اطلاعاتتان اضافه کرد، حتما با دیگران به اشتراگ بگذارید.
وسایل لازم برای ساخت ربات آتشنشان پیشرفته با برد آردوینو
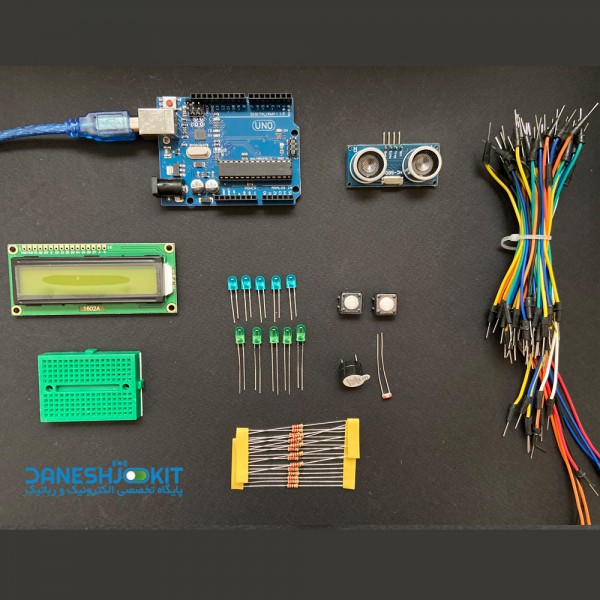
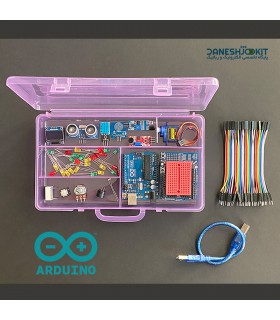
معرفی اقلام حیاتی برای یادگیری آردوینو Arduino
وسایل لازم برای ساخت یخچال ماشینی و فرمول محاسبه المان خنک کننده TEC
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم