










109,800 تومان
بسته 20 عددی دیود مادون قرمز فرستنده و گیرنده
توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
توجه: این دوربین با سنسور دید درشب IR سازگاری ندارد.
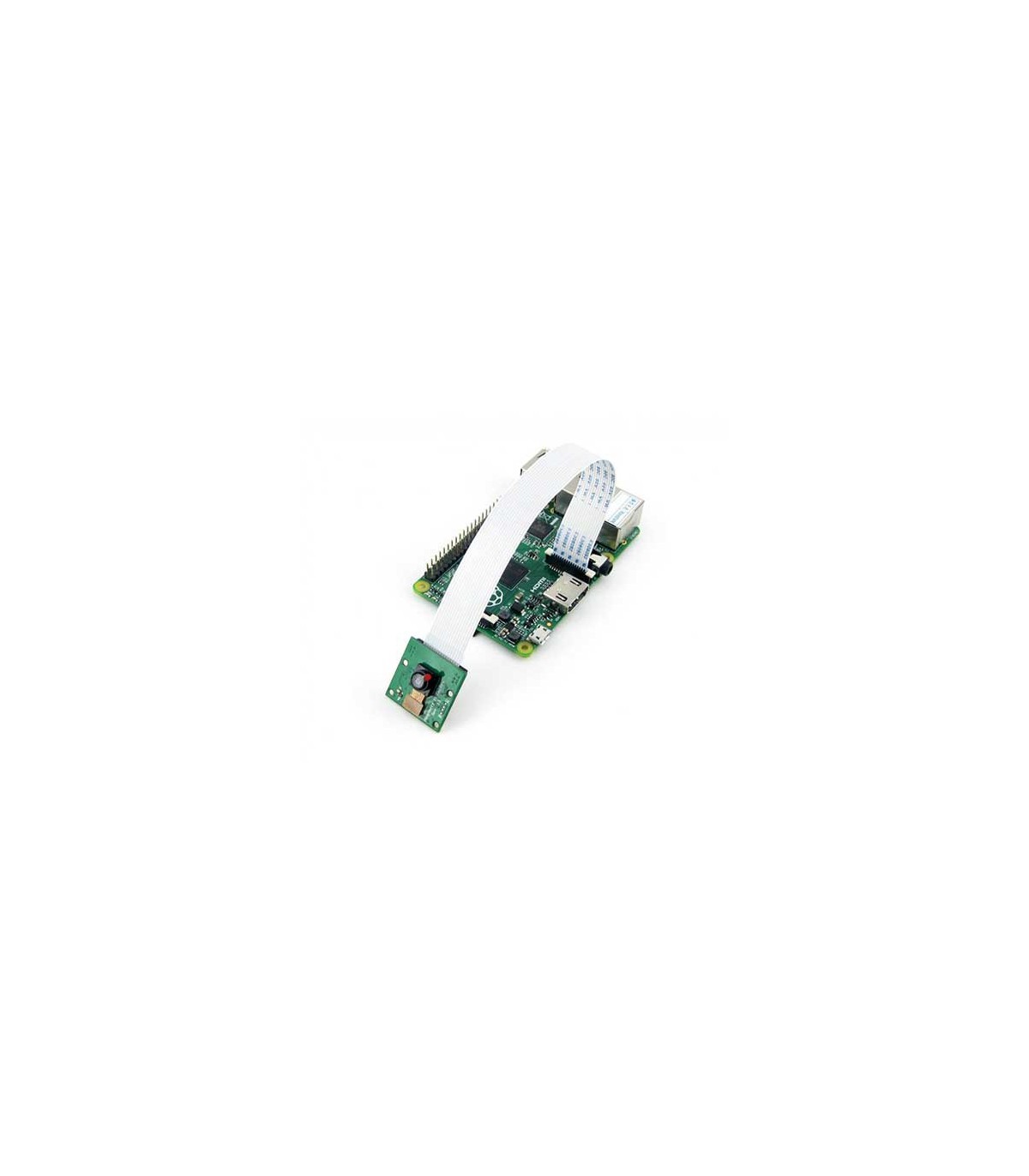
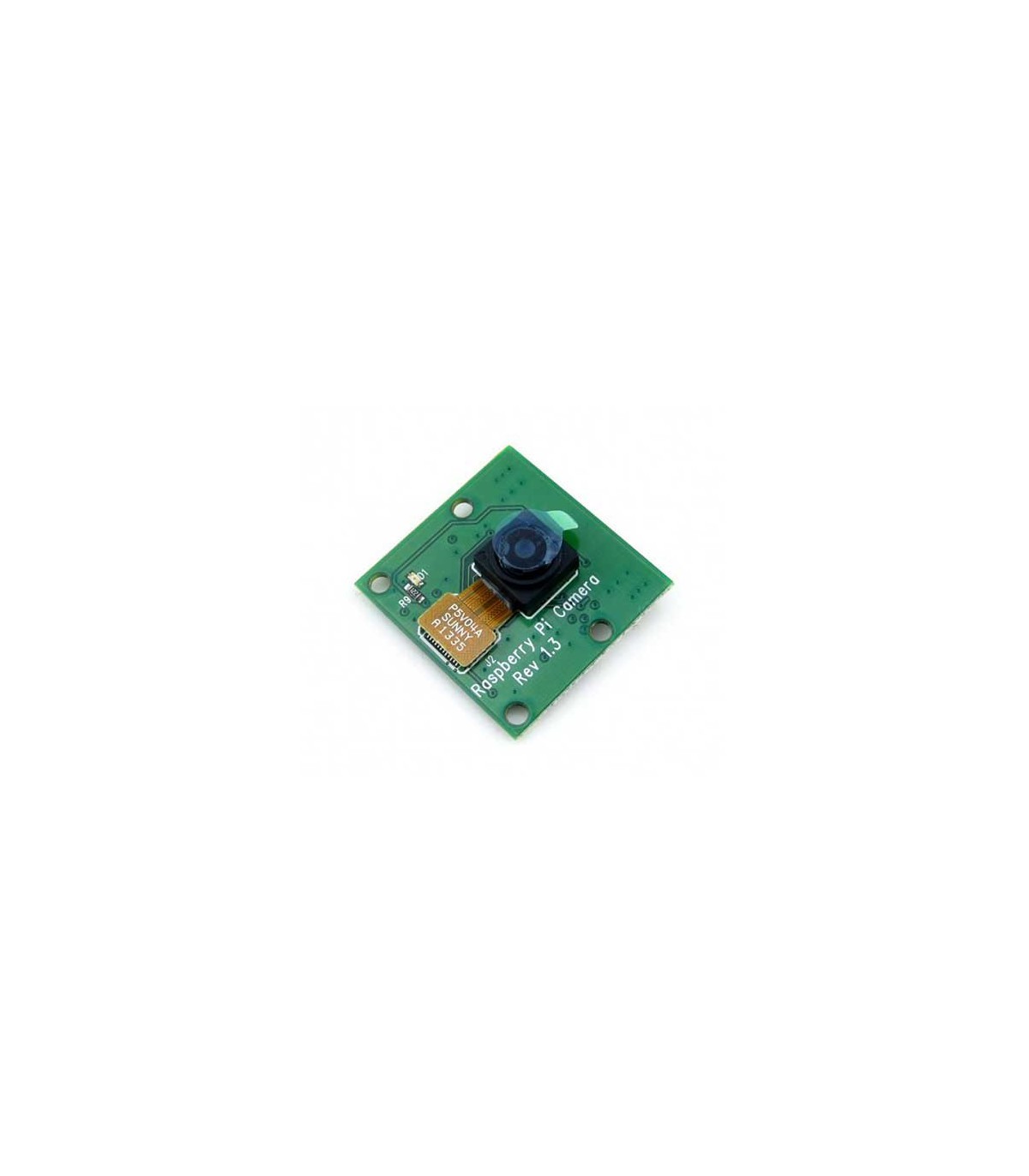
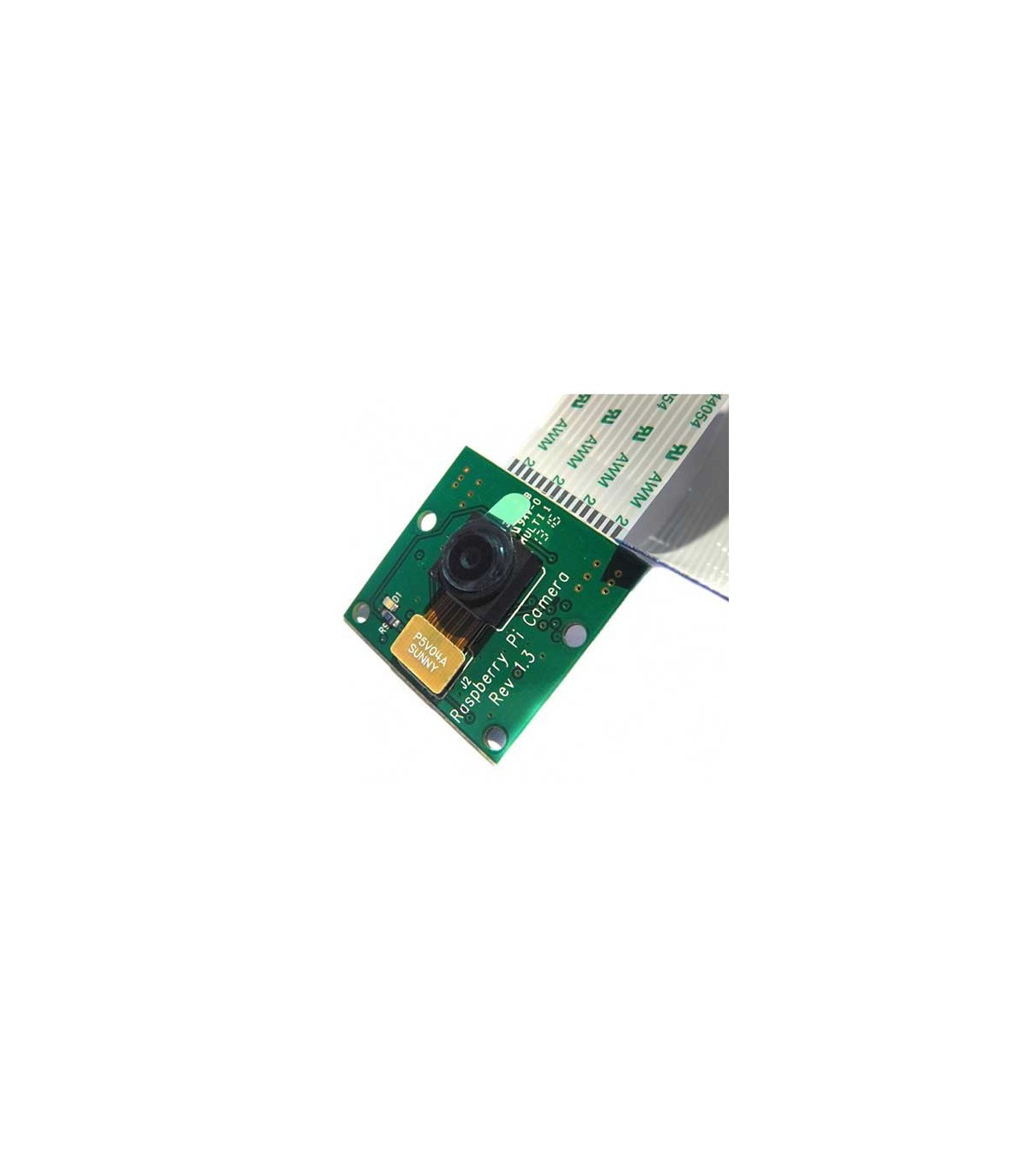
ِیکی از ویژگی هایی که برد رزبری پای Raspberry Pi را نسبت به دیگر بردهای امبدد متمایز کرده، وجود اسلات دوربین Camera با عنوان اسلات دوربین است. مدل دوربین OVA5647 است. دوربین رزبری پای 5 مگاپیکسل Omnivision و با کیفیت 1080P است و قابلیت نصب سنسور دید در شب برای تصویر برداری در شب دارد. دوربین رزبری پای توسط کامند لاین سیستم عامل رزبین و همچنین با زبان برنامه نویسی پایتون قابل راه اندازی و اجرا است. رزولوشن تصویر در حالت ثابت برابر با 2592x1944 است. دوربین رزبری پای دارای رابط داخلی سریال 15 پایه MIPI بهره میبرد. همچنین کیفیت فیلم برداری 1080 و در فریم های 30fps, 720p @ 60fps فیلم برداری انجام میشود.
یکی از ویژگی هایی که برد رزبری پای Raspberry Pi را نسبت به دیگر بردها متمایز کرده، وجود اسلات دوربین Camera بر روی برد است. پردازش تصویر یکی از پروژه های پرکاربرد در اینترنت اشیا است که وابسته به دوربین و رزبری پای Raspberry Pi میباشد. دوربین رزبری پای به دو روش از طریق کامند لاین و پایتون قابل راه اندازی است.
مشخصات
این دوربین دارای تراشه IMX219 است و بایستی پورت برد مورد نظر شما با این تراشه سازگاری داشته باشد.
دستگاه FMB920 دادههای موقعیت و وضعیت خودرو را ارسال میکند. برای مشاهده این دادهها باید دستگاه به سرور و اپلیکیشن یا سامانه ردیابی متصل شود. در صورت تمایل میتوانید به هنگام خرید گزینهی به همراه اپلیکیشن را انتخاب کنید.
بله، اما این حالت بیشتر برای کاربران فنی مناسب است. کاربر عمومی برای مشاهده خودرو روی نقشه، دریافت گزارش و مدیریت هشدارها معمولا به اپلیکیشن یا پنل ردیابی نیاز دارد.
توسط همین ماژول هم میتوانید اقدام به اجرای درخواستتان کنید. البته اگر فقط بخواهید یک سلول باتری لیتیومی را مدیریت شارژ کنید، همان گزینه ماژول TP4056 مناسب خواهد بود.
امکان راه اندازی چند سنسور DHT با ESP8266 با استفاده از MicroPython وجود دارد. سنسورهای DHT با پروتکل دیجیتال و از طریق پایههای GPIO قابل اتصال به میکروکنترلرها هستند.
برای ساخت یک سیستم کنترل دما با برد میکروکنترلر ESP32، به موارد زیر نیاز دارید:
یک برد میکروکنترلر ESP32
یک سنسور دما مثل DHT DS18B20
یک المان سرد کننده
با استفاده از کتابخانه DHT.h، میتوانید از سنسور دما برای خواندن دمای محیط استفاده کنید. سپس، میتوانید از این دما برای کنترل المان گرمایشی یا سرمایشی استفاده کنید.
در خصوص برنامه نویسی از کتابخانه DHT و در صورت نیاز کتابخانه وای فای برای ارسال دادهها به پلتفرم IoT باید استفاده کنید.
بله این امکان وجود دارد. با توجه به اینکه برد رزبری پای دارای پایههای GPIO است. امکان اتصال انواع ماژولهای مختلف را دارد. ماژولهای اترنت به SPI هم یکی از این موارد پر مصرف هستند. میتوانید از شاخه ماژول اترنت و شبکه انواع این بردها را برای اتصال به رزبری پای بررسی کنید.
رزبری پای یک کامپیوتر کوچک و قدرتمند است که بسیاری افراد از آن برای پروژههای الکترونیکی و رباتیکی استفاده میکنند. برای کار با دوربین رزبری پای، بایستی دستورات لینوکسی را در محیط سیستم عامل وارد کنید. برخی از این دستورات به شرح زیر هستند.
دستور raspistill: این دستور برای گرفتن تصاویر از دوربین استفاده میشود. به عنوان مثال، برای گرفتن یک تصویر با اندازه ۱۰۲۴x۷۶۸، میتوانید دستور raspistill -o image.jpg -w 1024 -h 768 را اجرا کنید.
دستور raspivid: این دستور برای ضبط ویدئو با دوربین استفاده میشود. برای مثال، برای ضبط یک ویدئو با کیفیت ۱۰۸۰p با سرعت فریم ۳۰، میتوانید دستور raspivid -o video.h264 -t 10000 -w 1920 -h 1080 -fps 30 را اجرا کنید.
دستور lsusb: این دستور برای نمایش لیست دستگاههای USB متصل به رزبری پای استفاده میشود. برای اجرای این دستور، باید ابتدا بسته usbutils را نصب کنید. دستور sudo apt-get install usbutils را اجرا کنید. سپس دستور lsusb را اجرا کنید.
دستور v4l2-ctl: این دستور برای تنظیمات دوربین و ویدئو استفاده میشود. برای مثال، برای تنظیم روشنایی به مقدار ۱۲۸، میتوانید دستور v4l2-ctl --set-ctrl=exposure=128 را اجرا کنید.
دستور motion: برنامه کاربردی که امکان ضبط ویدئو با دوربین را در زمان واقعی میدهد. برای نصب این برنامه، دستور sudo apt-get install motion را اجرا کنید. سپس با ویرایش فایل تنظیمات /etc/motion/motion.conf، میتوانید تنظیمات مورد نظر خود را اعمال کنید. به عنوان مثال، میتوانید روشنایی، کانتراست و سایر تنظیمات دوربین را تنظیم کنید.
دستور fswebcam: این دستور برای گرفتن تصویر از دوربین با استفاده از خط فرمان استفاده میشود. به عنوان مثال، برای گرفتن یک تصویر با اندازه ۱۰۲۴x۷۶۸، میتوانید دستور fswebcam -r 1024x768 image.jpg را اجرا کنید.
دستور ffmpeg: این برنامه برای تبدیل ویدئوها به فرمتهای دیگر و همچنین برای تغییر اندازه ویدئو و صدا و دیگر عملیاتهای پردازش ویدئو استفاده میشود. به عنوان مثال، برای تبدیل یک فایل ویدئویی به فرمت MP4، میتوانید دستور ffmpeg -i inputfile.avi outputfile.mp4 را اجرا کنید.
دستور v4l2-ctl چرخش تصویر: برای چرخش تصویر دوربین در رزبری پای، میتوانید از دستور v4l2-ctl استفاده کنید.
برای چرخش تصویر به صورت عمودی (90 درجه) میتوانید از دستور v4l2-ctl --set-ctrl=rotate=90 استفاده کنید.
برای چرخش تصویر به صورت افقی (180 درجه)، میتوانید از دستور v4l2-ctl --set-ctrl=rotate=180 استفاده کنید.
در نهایت، برای بازگشت به حالت اولیه (0 درجه)، میتوانید از دستور v4l2-ctl --set-ctrl=rotate=0 استفاده کنید.
توجه داشته باشید که این دستورات تنها تصویر دوربین را در زمان اجرا چرخانده و تغییری در تنظیمات دوربین نخواهند داشت.
این دستورات تنها چند مثال از دستوراتی هستند که میتوانید برای کار با دوربین در رزبری پای استفاده کنید. لیستی از دستورات بیشتر را میتوانید با جستجوی اینترنت و یا در منابع آموزشی مختلف پیدا کنید.
دوربین IMX219 یک دوربین با رابط MIPI CSI-2 است که اکثرا با بردهای توسعهی مبتنی بر پردازندههای ARM که دارای رابط CSI-2 هستند، سازگاری دارد. برخی از این بردها شامل Raspberry Pi، Jetson Nano، Odroid و Orange Pi is هستند. با این حال، برای استفاده از دوربین IMX219 با هر برد دیگری، باید بررسی کنید که آیا برد شما دارای رابط MIPI CSI-2 است یا خیر. CSI2 یک رابط سریال پایدار برای انتقال داده های تصویری از سنسورهای تصویری به پردازنده ها است. برخی از بردهایی که دارای CSI2 هستند عبارتند از:
1- Raspberry Pi CM4
2- Nvidia Jetson Nano
3- Orange Pi
4- BeagleBone Black
5- Coral Dev Board
6- Qualcomm DragonBoard
7- HiKey 960
و بسیاری بردهای دیگر با پردازنده های مختلف از جمله ARM و x86.
لازم به ذکر است که برخی از این بردها ممکن است نیاز به ماژول تبدیل CSI2 به HDMI یا USB داشته باشند تا بتوانند با دوربین های دیگری که از رابط های HDMI یا USB استفاده می کنند سازگاری پیدا کنند.
باگ های نرم افزاری به مرور زمان با بهروزرسانی جدید به صورت اتوماتیک رفع خواهد شد. پیشنهاد میشود ورژن 3 را نصب کنید.
اگر نسخه 4 از Thonny IDE بر روی ویندوز 7 برای شما مشکلساز است و به دنبال جایگزینی مناسب برای توسعه میکروپایتون هستید، میتوانید از محیطهای توسعه دیگری استفاده کنید.
Mu: Mu یک محیط توسعه سبک و کم حجم برای میکروپایتون است. این نرمافزار بر روی ویندوز 7 نصب و اجرا میشود و ویژگیهای ساده و کاربرپسندی دارد.
IDLE (Integrated Development and Learning Environment): IDLE یک IDE رسمی برای میکروپایتون است و به صورت پیشفرض در همراه با نصب پایتون نصب میشود. این IDE از ورژنهای مختلف میکروپایتون پشتیبانی میکند.
Visual Studio Code (VS Code): اگر از یک IDE قدرتمند و انعطافپذیر برای توسعه میکروپایتون بهره میبرید، میتوانید از VS Code با استفاده از افزونههای مرتبط با میکروپایتون استفاده کنید. این IDE روی ویندوز 7 نیز عملکرد مناسبی دارد.
PyCharm Community Edition: اگر به دنبال یک IDE حرفهای برای توسعه پروژههای میکروپایتون هستید، میتوانید از نسخه رایگان PyCharm Community Edition استفاده کنید. این IDE ویژگیهای بسیار زیادی دارد و بر روی ویندوز 7 نیز قابل نصب است.
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم