


توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
سنسور آلتراسونیک SRF Ultrasonic با استفاده از امواج صوتی فاصله شی را اندازه گیری میکند. نوعی تشخیص مانع توسط سنسور آلتراسونیک به واسطه یک مبدل پالسها را ارسال و دریافت میکند. تا اطلاعات مربوط به فاصله یک شی را اندازه گیری کرده و ارسال کند. سنسورهایی که در دسترس ما هستند تنها از یک مبدل جهت ارسال پالس و دریافت اکو Echo استفاده میکنند. با اندازه گیری فاصله زمانی بین دریافت و ارسال پالس آلتراسونیک فاصله تا شی مورد نظر را اندازه گیری میکند. از سنسورهای آلتراسونیک در طراحی رباتها جهت تشخیص مجاورت با شی، تشخیص سطح مانند سطح آب، تشخیص موقعیت و تشخیص فاصله میتوان استفاده کرد. جهت اندازه گیری فاصله سنسور، از فرمول خاصی استفاده میکند که سرعت صوت در رفت و برگشت را محاسبه کرده و با تبدیل متر بر ثانیه به واحد میکرو در سانتی متر، فاصله را نمایش میهد. ماژول SRF04 یک ماژول سنجش فاصله الکترونیکی است که برای اندازه گیری فاصله از سطح به کار میرود. این ماژول از تکنولوژی فرستنده و گیرنده الکترونیکی استفاده میکند تا امواج صوتی را از مبدا تولید کند و با دریافت بازتابی از سطح، فاصله را محاسبه کند. ماژول SRF04 به عنوان یک سنسور فاصله استفاده میشود و میتواند در رباتیک، اتوماسیون خانگی و سایر کاربردهایی که نیاز به اندازه گیری فاصله دارند، مورد استفاده قرار گیرد.
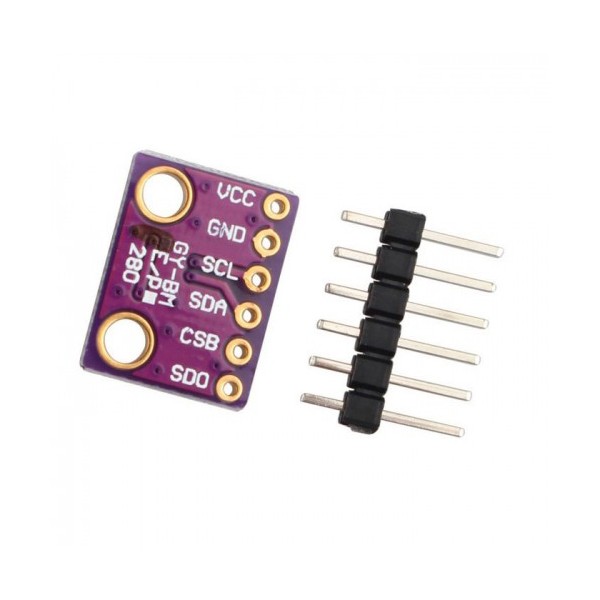
ماژول آلتراسونیک SRF04 از پنج پایه تشکیل شده است که شمارهبندی پایههای آن به صورت زیر است.
1- Vcc: ولتاژ تغذیه، باید به یک منبع تغذیه DC متناسب با ولتاژ مورد نیاز ماژول (معمولاً ۵ ولت) متصل شود.
2- Trig: پایهی تریگر برای فعالسازی فرستنده التراسونیک است.
3- Echo: پایهی اکو برای دریافت سیگنال بازگشتی از گیرنده التراسونیک است.
4- NC: پایهی اتصال شده به هیچیز، بهطور کلی از استفادهای برخوردار نیست.
5- GND: مرجع منبع تغذیه و مرجع سیگنالهای الکتریکی، باید به مرجع منبع تغذیه متصل شود.
.jpg)
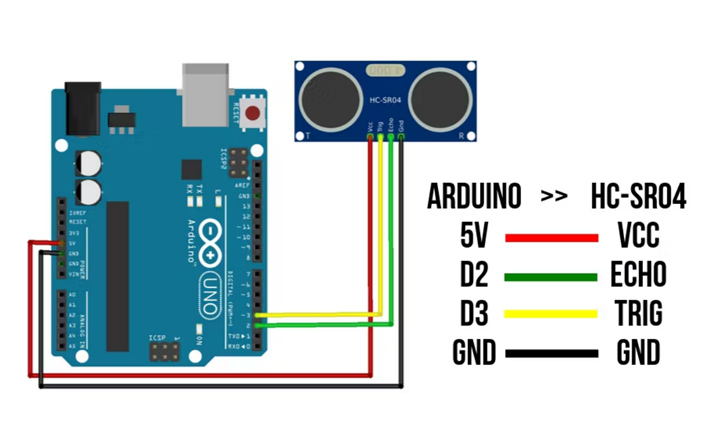
برای راهاندازی ماژول SRF04 به صورت ساده، میتوانید از یک میکروکنترلر مثل آردوینو استفاده کنید. به طور کلی، برای راهاندازی ماژول SRF04، ابتدا باید ماژول را به تغذیه وصل کرده و سپس پایه تریگر (Trig) را به یک پین خروجی میکروکنترلر متصل کنید. سپس پایه اکو (Echo) را به یک پین ورودی میکروکنترلر متصل کنید. سپس برنامهای برای میکروکنترلر خود بنویسید که پایه تریگر را فعال کند (یعنی آن را به حالت HIGH ببرد)، بعد از کمی تاخیر، پایه تریگر را غیرفعال کند (یعنی آن را به حالت LOW ببرد) و سپس منتظر شروع ارسال سیگنال اکو از ماژول شود. وقتی سیگنال اکو از ماژول دریافت شد، میتوانید زمان گذرشده بین ارسال سیگنال توسط تریگر و دریافت سیگنال توسط اکو را با توجه به سرعت صوت و مسافت محاسبه کنید. در ادامه یک کد نمونه برای راهاندازی ماژول SRF04 با استفاده از آردوینو آمده است.
#define trigPin 3
#define echoPin 2
void setup() {
Serial.begin (9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
long duration, distance;
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = (duration/2) / 29.1;
Serial.print(distance);
Serial.println(" cm");
delay(500);
}
در این کد، پایه تریگر به پین 3 و پایه اکو به پین 2 متصل شده است. در تابع loop ابتدا پایه تریگر را فعال میکنیم و بعد از 10 میکروثانیه، آن را غیرفعال میکنیم.
چنانچه برد آردوینو ندارید و یا میخواهید از بردهای دیگری برای راه اندازی استفاده کنید. میتوانید برای راه اندازی ماژول SRF04 بدون استفاده از برد آردوینو از میکروکنترلر STM32F103C8T6 و کد نویسی به زبان C استفاده کنید. ابتدا باید پایه های ماژول SRF04 را به میکروکنترلر وصل کنید. پایه های Trigger و Echo به ترتیب به پایه های PB0 و PB1 میکروکنترلر متصل میشوند. سپس کد زیر را در نرم افزار Keil C نوشته و کامپایل کنید.
#include "stm32f10x.h"
#define TRIG_PIN GPIO_Pin_0
#define ECHO_PIN GPIO_Pin_1
#define TRIG_PORT GPIOB
#define ECHO_PORT GPIOB
void delay_us(uint32_t us)
{
SysTick->LOAD = 9*us;
SysTick->VAL = 0;
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_ENABLE_Msk;
while (!(SysTick->CTRL & SysTick_CTRL_COUNTFLAG_Msk));
}
void delay_ms(uint32_t ms)
{
while (ms--)
{
delay_us(1000);
}
}
void init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = TRIG_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(TRIG_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = ECHO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(ECHO_PORT, &GPIO_InitStructure);
}
int main(void)
{
uint32_t distance = 0;
init();
while(1)
{
GPIO_SetBits(TRIG_PORT, TRIG_PIN);
delay_us(10);
GPIO_ResetBits(TRIG_PORT, TRIG_PIN);
while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == RESET);
uint32_t start_time = SysTick->VAL;
while(GPIO_ReadInputDataBit(ECHO_PORT, ECHO_PIN) == SET);
uint32_t end_time = SysTick->VAL;
uint32_t elapsed_time = start_time - end_time;
distance = elapsed_time * 0.017; // حساب کردن فاصله با توجه به زمان سپری شده
delay_ms(500); // تاخیر برای انجام
ماژول SRF04 برای راهاندازی به چندین پین نیاز دارد که برای استفاده بدون میکروکنترلر، میتوان از یک کنترلر منطقی مانند 74HC595 استفاده کرد. برای این کار، ابتدا سیگنال تریگر (Trigger) به یکی از ورودیهای کنترلر منطقی وصل شده و سپس با اعمال سیگنال کنترلی مناسب به ورودیهای کنترلر منطقی، میتوان خروجی ECHO را اندازهگیری کرد.
برای این کار، ابتدا باید به یک پین کنترلر منطقی مانند 74HC595 سیگنال تریگر (Trigger) متصل شود. پس از آن، باید با اعمال یک سیگنال فعال کنترلی مناسب به پین تریگر، سیگنال تریگر فعال شود. سپس باید اندازهگیری زمانی که سیگنال ECHO فعال است را با استفاده از یک تایمر اندازهگیری کرده و با توجه به این زمان و فرمول محاسبه فاصله، فاصله مورد نظر را محاسبه کرد. به طور کلی، استفاده از ماژول SRF04 بدون استفاده از میکروکنترلر یک کار دشوار و زمانبر است و به دلیل پیچیدگی بالای این روش، استفاده از میکروکنترلر بهصورت گستردهتر توصیه میشود.
با شیوع اپیدمی کرونا در سراسر دنیا، ساخت مایع ریز کرونا اتوماتیک ایدهای بوده که فراگیر شده است. تقریبا در تمامی مراکز از آن استفاده میشود. به صورت کلی برای پاشش محلول ضدعفونی بدون تماس دست با سطحی خاص، انتخاب مناسبی است. سنسورهای مختلفی یرای این منظور مورد استفاده قرار گرفتهاند هر کدام نقاط قوت و ضعف خاصی دارند. از جمله سنسورهای پرکاربرد و مصرفی در ساخت مایع ریز کرونا، مدل آلتراسونیک است. برای این منظور ساخت مایع ریز با استفاده از بردهای میکروکنترلر مانند آردوینو Arduino به راحتی قابل اجرا است. در این آموزش توسط سنسور فاصله سنج آلتراسونیک SRF به رله فرمان قطع و وصل میدهیم.
سنسور فاصله سنج SRF با استفاده از امواج آلتراسونیک فاصله شی تا سنسور را تشخیص داده و طبق فرمول سرعت رفت و برگشت صوت محاسبه شده و دیتا ارسال میشود. توسط این سنسور میتوانید ۴ مکان مختلف از یک ربات را مدیریت کرده و تشخیص مانع را انجام داد. در این آموزش روش ساخت مدار تشخیص مانع چهار وجهی با استفاده از ۴ عدد سنسور آلتراسونیک اجرا میشود. به عبارتی شبیه سازی برای استفاده در چهار وجه خودرو در حال حرکت است.
سنسور فاصله سنج SRF با استفاده از امواج آلتراسونیک فاصله شی تا سنسور را تشخیص داده و طبق فرمول سرعت رفت و برگشت صوت محاسبه شده و دیتا ارسال میشود. در این آموزش توسط میکروکنترلر آردوینو و سنسور فاصله سنج و فاصله را اندازه گیری کرده و بر روی نمایشگر کاراکتری LCD نمایش میدهیم.
برای راه اندازی یک سنسور آلتراسونیک در زبان C++ بایستی در ابتدا توسط فرمول سرعت صوت را اندازه گیری کرده و با تبدیل واحدها پارامترهای مورد نیاز را تحلیل نماییم. طبیعتا جهت راحتی کار کتابخانه های مناسبی برای آن ها در نظر گرفته شده است. در نرم افزار Node-RED روش اندازه گیری پارامترهای سنسور بسیار ساده شده است.
مشخصات
دستگاه FMB920 دادههای موقعیت و وضعیت خودرو را ارسال میکند. برای مشاهده این دادهها باید دستگاه به سرور و اپلیکیشن یا سامانه ردیابی متصل شود. در صورت تمایل میتوانید به هنگام خرید گزینهی به همراه اپلیکیشن را انتخاب کنید.
بله، اما این حالت بیشتر برای کاربران فنی مناسب است. کاربر عمومی برای مشاهده خودرو روی نقشه، دریافت گزارش و مدیریت هشدارها معمولا به اپلیکیشن یا پنل ردیابی نیاز دارد.
امکان راه اندازی چند سنسور DHT با ESP8266 با استفاده از MicroPython وجود دارد. سنسورهای DHT با پروتکل دیجیتال و از طریق پایههای GPIO قابل اتصال به میکروکنترلرها هستند.
برای ساخت یک سیستم کنترل دما با برد میکروکنترلر ESP32، به موارد زیر نیاز دارید:
یک برد میکروکنترلر ESP32
یک سنسور دما مثل DHT DS18B20
یک المان سرد کننده
با استفاده از کتابخانه DHT.h، میتوانید از سنسور دما برای خواندن دمای محیط استفاده کنید. سپس، میتوانید از این دما برای کنترل المان گرمایشی یا سرمایشی استفاده کنید.
در خصوص برنامه نویسی از کتابخانه DHT و در صورت نیاز کتابخانه وای فای برای ارسال دادهها به پلتفرم IoT باید استفاده کنید.
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم