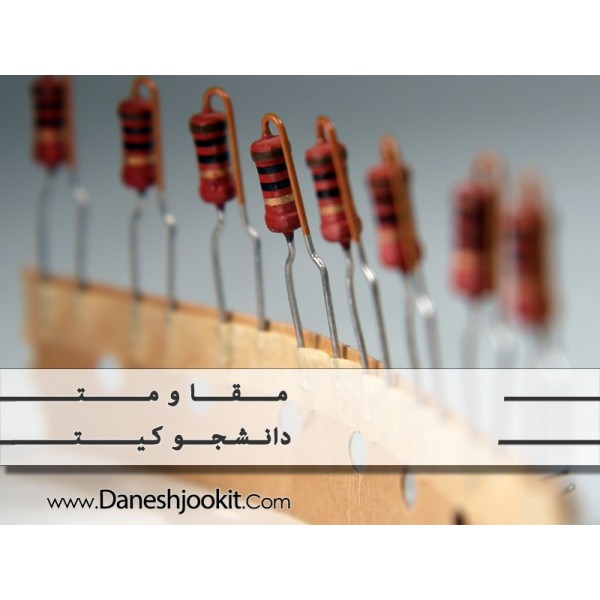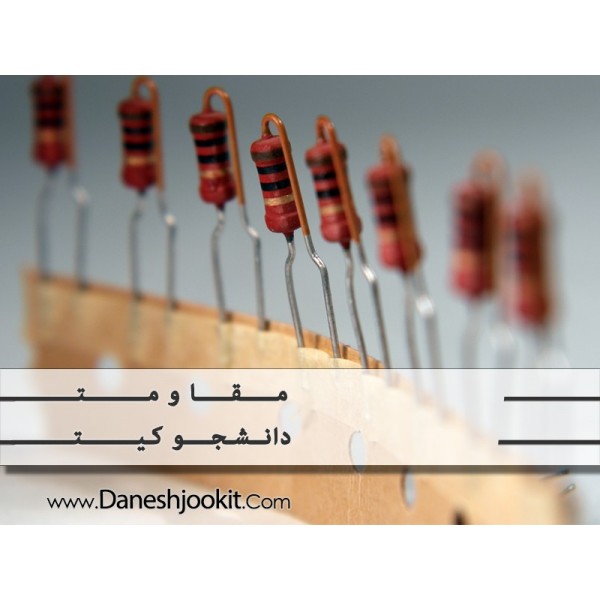



فیبر تبدیل SMD به DIP به صورت دو رو میباشد. از یک سمت با فاصله 1.27 میلی متر و از سمت دیگر با فاصله 0.65 میلی متر قابل تبدیل است.
توجه: قیمت و موجودی به روز است و فروش حضوری نداریم. ساعات پاسخگویی از 9 تا 4 عصر
این کتاب که در دانشگاه ها با نام طراحی دیجیتال یا مدار منطقی برای دانشجویان گرایش های مختلف برق و کامپیوتر تدریس می شود.
در بین منابع مختلفی که برای این درس وجود دارد، این کتاب به علت سادکی و روانی نگارش بیشتر مورد استفاده قرار می گیرد.
پیشگفتار:
یکی از راه های تقرب به ذات اقدس علم است، علمی که انسان خداپرست در ذره ذره اش نشانی از آفریدگار می بیند و هرچه عملش افزون گردد تقربش به خدای تعالی بیشترمی شود.
کتاب حاضر، ترجمه ویرایش پنجم از کتاب Digital Design نوشته M.MORRIS MANO و MICHAEL D.CILETTI می باشد که در دانشگاه های کشور با نام طراحی دیجیتال یا مدار منطقی برای دانشجویان گرایش های مختلف برق و کامپیوتر تدریس می شود. در بین منابع مختلفی که برای درس طراحی دیجیتال (مدار منطقی) وجود دارد این کتاب بعلت سادگی و روانی نگارش بیشتر مورد استفاده قرار می گیرد. به همین دلیل سعی شده که در ترجمه کتاب رعایت امانت لحاظ گردد.
امید است کتابی که اینک به ز بان فارسی در دسترس دانشجویان و اساتید محترم قرار گرفته است سهم موثری در راه گسترش دانش فنی مدارهای منطقی و دیجیتال داشته باشد. بعلت آنکه تشریح مسائل انتهای فصول این کتاب توسط انتشارات سها دانش چاپ گردیده و مورد استقبال فراوان قرار گرفته است، بخش پاسخ به مسائل انتخابی در انتهای کتاب آورده نشده است دانشجویان محترم در صروت لزوم می توانند از کتاب تشریح مسائل استفاده کنند.
فهرست مطالب کتاب:
1 سیستم های دیجیتال و اعداد دودویی
1- سیستمهای دیجیتال
2- اعداد دودویی
3- تبدیلات مبنای اعداد
4- اعداد مبنای هشت و شانزده
5- مکمل های اعداد
6- اعداد دودویی علامتدار
7- کدهای دودویی
8- حافظه ها و ثبات های دودویی
سیستم های دیجیتال
سیستم های دیجیتال نقش برجسته ای در زندگی روزمره دارد که ما را به دوره ای از تکنولوژی حاضر بعنوان عصر دیجیتال ارجاع می دهد. سیستم های دیجیتال در ارتباطات، معاملات اقتصادی، کنترل ترافیک سیستم هدایت فضایی، عملیات پزشکی، نظارت هواشناسی، اینترنت و بسیاری دیگر از اقدامات علمی، صنعتی و اقتصادی استفاده می شود. ما تلفن های دیجیتال، تلویزیون های دیجیتال، دیسک های چند بعدی دیجیتال، دوربین های دیجیتال و.. البته کامپیوترهای دیجیتال داریم. ا
ز آهنگ های دانلود شده در مدیا پلیرهایمان و دیگر دستگاه های قابل حمل با دست با رزولیشن بالا لذت می بریم. این دستگاه ها دارای واسط های گرافیکی مورد استفاده کاربر (GUIs) هستند که قادرند دستوراتی را که برای کاربر ساده هستند را اجرا می کنند که در واقع شامل اجرای دقیقی از یک رشته از ساختارهای داخلی پیچیده می باشند. قابل توجه ترین ویژگی کامپیوتر دیجیتال عمومیت آن است. آن می تواند از ساختارهای ترتیبی که برنامه نامیده می شود پیروی کند که بر طبق اطلاعات داده شده عمل می کند.
1- مقدمه
2- تعریف های اولیه
3- تعریف اصول جبربول
4- تئوری ها یا خواص اصلی جبربول
5- توابع بول
6- فرم های متعارف و استاندارد
7- سایز عملیات منطقی
8- گیت های منطقی دیجیتال
9- مدارهای مجتمع
مقدمه
به این علت که منطق دودویی در تمام دستگاه ها و کامپیوترهای دیجیتال امروز بکار می رود، هزینه مداراتی مورد استفاده یک فاکتور مهم برای طراحان می باشد. پیدا کردن یک مدار ساده و ارزانتر می تواند بازدهی عظیمی را در کاهش هزینه ی تمام شده طرح حاصل آورد. روش های ریاضی مدارات را با استفاده از اصول جبر بول ساده سازی می نماید. بنابراین این فصل یک سری مفاهیم اولیه و یک مبنای مختصری از جبربول که شما را برای بهینه سازی مدارهای ساده آماده می کند را فراهم می آورد و هدف از الگوریتم های استفاده شده بوسیله ابزارهای نرم افزاری بمنظور بهینه سازی مدارهای مجتمع از میلیون ها گیت منطقی تشکیل شده اند را برای شما تشریح می کند.
1- مقدمه
2- روش دیاگرام یا جدول کارنو
3- جدول چهارم متغیره
4- ساده سازی تابع حاصل ضرب مجموع ها
5- حالات بی اهمیت
6- پیاده سازی گیت های NAND و NOR
7- سایر پیاده سازی های دو طبقه
8- تابع XOR
9- زبان توصیف سخت افزاری
مقدمه
ساده سازی Gate –level عمل طراحی برای یافتن پیاده سازی بهینه Gate – level توابع بولی می باشد که یک مدار دیجیتال را توصیف می کنند. این کار بخوبی درک می شود اما زمانی که منطق دارای ورودی بسیاری باشد، برای اجرا با روشهای دستی سخت می گردد. خوشبختانه ابزار تجزیه و تحلیل کامپیوتری می توانند یک مجموعه بزرگ مسائل را بدانند. این فصل مبنایی برای فهمیدن مطالب مهم می باشد و شما را برای اجرای طراحی دستی مدارهای ساده قادر می سازد و مهارت استفاده از ابزار طراحی مدرن را به شما آموزش می دهد. همچنین این فصل یک زبان توصیفی سخت افزاری را که بوسیله ی ابزارطراحی مدرن استفاده می شود را معرفی می کند.
1- مقدمه
2- مدارهای ترکیبی
3- روش تحلیل
4- فرآیند طراحی
5- جمع کننده و تفریق گر دودویی
6- جمع کننده دهدهی
7- ضرب کننده ی دودویی
8- مقایسه گر مقدار
9- دیکدرها
10- انکدرها
11- مولتی پلکسرها
12- مدل های HDL برای مدارهای ترکیبی
مقدمه
مدارهای منطقی برای سیستم های دیجیتال ممکن است ترکیبی یا ترتیبی باشند. یک مدار ترکیبی شامل گیت های منطقی است که خروجی های آنها در هر لحظه اززمان ازورودی های ترکیبی همان زمان بدست می آید. یک مدار ترکیبی عملیاتی را انجام می دهد که بطور منطقی بوسیله یک مجموعه از توابع بول تعیین می گردد. در مقابل، مدارهای ترتیبی عناصر حافظه را علاوه بر گیت های منطقی بکار می برند که خروجی هایشان تابعی از ورودی ها و حالت عناصر حافظه می باشند. بعلت اینکه حالت عناصر حافظه تابعی از ورودی ستم های دیجیتال ممکن است ترکیبی یا ترتیبی باشند.
یک مدار ترکیبی شامل گیت های منطقی است که خروجی های آنها در هر لحظه اززمان ازورودی های ترکیبی همان زمان بدست می آید. یک مدار ترکیبی عملیاتی را انجام می دهد که بطور منطقی بوسیله یک مجموعه از توابع بول تعیین می گردد. در مقابل، مدارهای ترتیبی عناصر حافظه را علاوه بر گیت های منطقی بکار می برند که خروجی هایشان تابعی از ورودی ها و حالت عناصر حافظه می باشند. بعلت اینکه حالت عناصر حافظه تابعی از ورودی های قبل است، خروجی های یک مدار ترتیبی نه تنها به مقادیر فعلی ورودی ها بلکه بر ورودی های قبلی نیز وابسته است و رفتار باید بوسیله یک ترتیب زمانی از ورودی ها و حالات داخلی تعیین گردد. مدارهای ترتیبی بلوک های ساخت برای سیستم های دیجیتال هستند و در فصول 5 و 8 بحث می گردند.
1- مقدمه
2- مدارهای ترتیبی
3- عناصر ذخیره کننده: لچ ها
4- عناصر ذخیره سازی: فلیپ فلاپ ها
5- تحلیل مدارهای ترتیبی ساعت دار
6- مدل های HDL قابل ترکیب مدارهای ترتیبی
7- کاهش و تخصیص حالت
8- روند طراحی
مقدمه
دستگاه های دستی، تلفن های همراه، دریافت کننده های راهبری، کامپیوترهای شخصی، دوربین های دیجیتال، مدیا پلیرهای شخصی و تمام تولیات الکترونیکی توانایی فرستادن، دریافت، ذخیره سازی، بازیابی و پردازش اطلاعات در غالب دودویی را دارند. این فصل عملکرد و کنترل این دستگاه ها و استفاده آنها درمدارها را آزمایش می کند و شما را قادر می سازد تا فهم بهتری را از آنچه که در این دستگاه ها روی می دهد را داشته باشید. مدارهای دیجیتالی که تاکنون در نظر گرفته شد ترکیبی بودهاند؛ یعنی خروجی ها مبتنی بر ورودی های جاری هستند. هرچند احتمال دارد هر سیستم دیجیتال مقداری مدار ترکیبی داشته باشد و بیشتر سیستم هایی که در عمل در نظر گرفته می شوند نیز شامل عناصرحافظه می گردند که لازم است سیستم بعنوان منطق ترتیبی توصیف شوند. در ابتدا می بایست وجه تمایزی بین مدار منطقی ترکیبی و مدار منطقی ترتیبی در نظر گرفت.
1- ثبات ها
2- شیفت رجیسترها
3- شمرنده های موجی
4- شمارنده های همزمان
5- شمارنده های دیگر
6- HDL برای ثبات ها و شمارنده ها
ثبات ها
یک مدار ترتیبی ساعت دار از یک گروه از فلیپ فلاپ ها و گیت های ترکیبی وصل شده بصورت پسخور تشکیل می شود. فلیپ فلاپ ها ضروری می باشند زیرا، در غیبت آنها، مدار به یک مدار ترکیبی صرف تبدیل می شود (که هیچگونه پسخوری را در مدار باقی نمی گذارد). یک مدار با فلیپ فلاپ ها حتی بدون گیت های ترکیبی یک مدار ترتیبی درنظر گرفته می شود. مدارهایی متشکل از فلیپ فلاپ ها بیشتر بخاطر اعمالی که انجام می دهند نه بخاطر نام مدار ترتیبی طبقه بندی می شوند. دو نمونه از این مدارها ثبات ها و شمارنده ها هستند.
1- مقدمه
2- حافظه با دستیابی تصادفی
3- دیکد کردن حافظه
4- آشکارسازی و تصحیح خطا
5- حافظه فقط خواندنی
6- آرایه منطقی برنامه پذیر
7- منطق آرایه ای قابل برنامه ریزی
8- وسایل قابل برنامه ریزی ترتیبی
مقدمه
یک واحد حافظه وسیله ای است که اطلاعات دودویی برای ذخیره شدن به آن منتقل می شوند. وقتی به اطلاعات برای پردازش نیازاست از آن بازیافت می شود. وقتی پردازش داده اتفاق می افتد، اطلاعات از حافظه به ثبات انتخاب شده در واحد پردازش منتقل می شود. نتایج میانی و پایانی به دست آمده در واحد پردازش، باز می گردند تا در حافظه ذخیره شوند. اطلاعات دودویی دریافتی از یک وسیله ورودی در حافظه ذخیره می شود و اطلاعات انتقالی به یک وسیله خروجی از حافظه گرفته می شود. یک واحد حافظه مجموعه ای از سلول هایی است که قادر به ذخیره مقداری بزرگ از اطلاعات دودویی می باشند.
1- مقدمه
2- سطح انتقال ثبات (RTL)
3- سطح انتقال ثبات در HDL
4- ماشین های الگوریتم حالت (ASM)
5- مثال طراحی
6- توصیف HDL مثال طراحی
7- ضرب کننده دودویی ترتیبی
8- مدار کنترل
9- توصیف HDL ضرب کننده دودویی
10- طراحی با مالتی پلکسر
11- طراحی بدون رقابت
12- طراحی بدون لچ
13- دیگر ویژگیهای زبان
مقدمه
رفتار بیشتر سیستم های دیجیتال به تاریخ ورودی هایش و شرایط تعیین کننده اعمال آینده آنها مبنی بر شرایط گذشته بستگی دارد. چنین سیستم هایی باید حافظه داشته باشند.یک سیستم دیجیتال سیستم منطقی ترتیبی است که با فلیپ ها و گیت ها بنا می شود. چنانچه در فصل 5 نشان داده شد. مدارهای ترتیبی را می توان با جداول حالت تعیین کرد. به علت این که تعداد حالت ها زیاد است تعیین یک سیستم دیجیتالی بزرگ توسط جدول حالت بسیار مشکل است. برای غلبه بر این مشکل سیستم های دیجیتالی توسط یک رویکرد ماژولی طراحی میشوند. سیستم به چند زیر سیستم ماژولی جزءبندی می شود که هرکدام وظیفه ای را اجرا می کند.
ماژول ها از اجزای دیجیتالی مانند ثبات ها، دیکدرها، مالتی پلکسرها، عناصر محاسباتی و مدار کنترل تشکیل می شوند. ماژول های مختلف با مسیرهای داده ای و سیگنال های کنترلی به هم متصل شده یک سیستم دیجیتال را تشکیل می دهند. ما در این فصل یک روش طراحی برای توصیف و طراحی سیستم های دیجیتالی پیچیده و بزرگ را نشان می دهیم.
1- مقدمه ای بر آزمایش ها
2- آزمایش 1: اعداد دودویی و دهدهی
3- آزمایش 2: گیت های منطقی دیجیتال
4- آزمایش 3: ساده سازی توابع بولی
5- آزمایش 4: مدارهای ترکیبی
6- آزمایش 5 : تبدیل کننده های کد
7- آزمایش 6: طراحی با مالتی پلکسر
8- آزمایش 7: جمع کننده ها و تفریق کننده ها
9- آزمایش 8: فلیپ فلاپ ها
10- آزمایش 9: مدارهای ترکیبی
11- آزمایش 10: شمارش گرها
12- آزمایش 11: شیفت رجیستر
13- آزمایش 12: جمع سری
14- آزمایش 13 : واحد حافظه
15- آزمایش 14: هندبال لامپی
16- آزمابش 15: تولید پالس ساعت
17- آزمایش 16: جمع کننده موازی و انباره
18- آزمایش 17: ضرب کننده دودویی
19- آزمایش های شبیه سازی VERILOG HDL و نمونه سازی سریع با FPGA
مقدمه ای بر آزمایش ها
این فصل 17 تمرین آزمایشگاهی در مدارهای دیجیتال و طراحی منطقی را نشان می دهد. این آزمایش ها با استفاده از کتاب های اطلاعات، تجربه مناسب را به دانشجو می دهد. مدارهای دیجیتال با استفاده از مدارهای مجتمع استاندارد (ICها) که به راحتی بر روی برد بورد نصب می شوند. ساخته می شود. آزمایش ها بر طبق موارد ارائه شده در کتاب مطرح می شوند. آخرین بخش از تعدادی پیشنهاد تکمیلی برای استفاده Verilog HDL برای شبیه سازی و بررسی عاملیت مدارهای دیجیتالی ارائه شده در آزمایشها، تشکیل شده است. اگر یک بورد نمونه سازی FPGA موجود باشد، آزمایش ها می تواند دریک FPGA به عنوان نوعی از ICهای استاندارد پیاده سازی می شود.
1- نمادهای مستطیل شکل
2- نمادهای مصوب
3- نمادسازی وابستگی
4- نمادهای برای قطعات ترکیبی
5- نماد برای قطعات فلاپ ها
6- نماد برای ثبات ها
7- نماد برای شمارنده ها
8-نماد برای RAM
نمادهای مستطیل شکل
اجزای دیجیتالی از قبیل گیت ها، دیکدرها،مالتی پلکسرها و ثبات ها به صورت مدار مجمتع در بازار قابل دسترس بوده و به صورت های SSI یا MSI طبقه بندی می شوند. نمادهای گرافیکی برای آنها و اجزای دیگر فراهم شده است، بنابراین کاربر می تواند عملگر هرکدام را از نماد گرافیکی تخصیص داده شده تشخیص دهد. این استاندارد که با 1984-91 ANSI/IEEE شناخته می شود، توسط صنعت، دولت و سازمان های حرفه ای تصویب شده و با استانداردهای بین المللی سازگاری دارد.
مشخصات
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم