


کتاب مرجع منحصر به فرد روباتیک (طراحی و ساخت)
کتاب آشنایی با علم رباتیک، از جمله کتاب های پایه ای است که شمارا با هرآنچه نیاز است درباره ربات بدانید، آشنا می کند. در این کتاب مفاهیم و اصطلاحات رباتیک آموزش داده شده اند و در ادامه به چگونگی طراحی و ساخت ربات می پردازد.
دو تعریف در رابطه با کلمه ربات که مورد توجه نویسنده بوده اند، از این قرارند:
تعریف اول که توسط Concise Oxford Dic صورت گرفته است، ماشینی مکانیکی با ظاهر یک انسان که با هوش و مطیع بوده ولی فاقد شخصیت است. این تعریف چندان دقیق نیست، زیرا تمام ربات های موجود دارای ظاهری انسانی نبوده و تمایل به چنین امری نیز وجود ندارد.
تعریف دوم که توسط موسسه ربات آمریکا صورت گرفته است، وسیله ای با دقت عمل زیاد که قابل برنامه ریزی مجدد بوده و توانایی انجام چند کار را دارد و برای حمل مواد، قطعات، ابزارها یا سیستم های تخصصی طراحی شده و دارای حرکات مختلف برنامه ریزی شده است و هدف از ساختن آن انجام وظایف گوناگون می باشد.
فهرست مطالب کتاب :
- فصل اول : آشنایی با علم رباتیک ----------------------- 13
این فصل که از 16 زیرشاخه تشکیل شده به بررسی ربات ها ، سنسورها و انواع سنسور ها در ربات پرداخته است .
1- تعریف ربات
2- دسته بندی ربات ها
3- ساختار عمومی یک ربات
4- ابزارها یا سیستم های انتقال
5- سنسورها
6- بینایی ربات
7- پردازش تصویر
8- انواع ربات و کاربرد آن ها در صنعت
9- ...
انجمن ربات های صنعتی ژاپن ، ربات ها را به 6 گروه تقسییم می کند:
1.یک دست مکانیکی که توسط اپراتور کار می کند
2.ربات با ترکیبات ثابت
3.ربات با ترکیبات متغیر
4.ربات قابل آموزش
5.ربات با کنترل عددی
6.ربات باهوش
سنسور ها : قطعاتی هستند متشکل از ابزارهای لامسه الکتریکی یا نوری که در کنار سایر عناصر الکترونیکی می توانند ایفای نقش کنند . انواع سنسورها در ربات : 1.سنسورمحیطی 2.سنسور بازخورد 3.سنسور فعال 4.سنسور غیرفعال 5.فاصله سنسورها 6.سنسور تماسی 7.سنسور مجاورتی 8.سنسورهای بافاصله
امکان استفاده ار ربات در صنعت در بخش های : تولید ، اکتشاف،جستجو و استخراج ، پزشکی و کارهای ساختمان وجود دارد .
- فصل دوم :مکانیک ربات ----------------------- 29
این فصل از 19 زیر شاخه تشکیل شده است . در این فصل به مسئله اصلی و یکی از موارد مهم و در ربانیک یعنی مکانیک ربات پرداخته شده است . در این فصل بررسی ساختار پروژه های ربانیک ، بدنه ربات ، اجزا از نطر ساختار سیستم حرکتی و عملکرد انواع موتور انجام شده است .
1- ساختار پروژه های مکاترونیک و رباتیک
2- بخش های مختلف یک پروژه مکاترونیک
3- مکانیک و سیستم حرکتی ربات
4- مقایسه کارکرد موتورهای مختلف با یکدیگر
5- عبور جریان از سیم پیچ ها
6- سرو موتور
7- موتور پله ای یا Stepper Motor
8- انواع چرخ های رباات
9- موارد مهم جهت انتخاب یک چرخ
10- ...
- فصل سوم : الکترونیک ربات ----------------------- 47
این فصل از 57 زیرشاخه تشکیل شده است .
انعظاف الکترونیک از مکانیک بیشتر و بهتر است . دریک پروژه مکاترونیک بهتر است بعد از طراحی شروع به پیاده سازی قسمت مکانیک ، سپس الکترونیک و بعد از این دو مرحله برنامه را پیاده سازی نماییم .
به همین ترتیبی که گفته شد انعطاف پذیر هستند یعنی اول مکانیک بعد الکترونیک و در آخر برنامه که نقاط ضعف الکترونیک و مکانیک را پر میکند .
در این فصل به معرفی مقادیر و کمیت های مختلف پرداخته شده و در انواع المان های الکتریکی و دستگاه های اندازه گیری و مدارهای مختلف و هم چنین بررسی انواع سنسور ها و هر یک را تشریح می کند .
1- مقدمه
2- بسامد یا فرکانس جریان متناوب
3- ولتاژ یا اختلاف پتانسیل
4- آشنایی با مقاومت و انواع آن
5- نحوه خواندن ظرفیت خازن با استفاده از کدهای رنگی و علامت ها
6- ترانزیستور BJT
7- تریستور SCR
8- آشنایی با منیع تغذیه
9- انواع سنسورهای بدون تماس
10- تکنیک های عیب یابی مدارات الکترونیکی
11- تحلیل خرابی
12- ...
- فصل چهارم : برنامه نویسی ربات ----------------------- 177
در این فصل در مورد برنامه نویسی و طراحی الگوریتم ربات بحث شده است و چند برنامه نمونه را در طول فصل خواهید نوشت.
طبق قوانین علمی و طبیعی هر شئ هدفمندی برای رسیدن به هدف و نتیجه ی مورد نظرش باید دارای برنامه و طراحی دقیق باشد تا بر اساس آن طرح بتواند مراحل کار خود را تشخیص داده و کارهای لازم را انجام دهد، ربات ها نیز ماشین هایی هدفمند هستند که انسان آن ها را برای انجام کاری معیین طراحی می کند.
یک ربات بدون الگوریتم و برنامه نوشته شده بر اساس آن چیزی به جز یک سری قطعات مکانیکی و الکترونیکی خشک و بی جان نیست؛ درست است که ربات دارای اعضاء و مغزی برای دستور دادن به آن ها است، ولی مغز ربات به خودی خود توانایی ساختن و اجرای دستورات را ندارد و باید توسط انسان برنامه ریزی گردد که به این کار برنامه نویسی و به برنامه ریزی بر روی آن Planning می گویند.
برای برنامه نویسی باید 5 مرحله زیر را طی کنیم:
1- انتخاب هدف یا اهداف مورد نظر
2- طراحی الگوریتم بر اساس اهداف
3- انتخاب یک زبان برنامه نویسی
4- یافتن کامپایلر زبان مد نظر
5- طراحی و نوشتن کدها و تبدیل آن ها به فرمت مورد نظر برای Planning روی ربات
- فصل پنجم : PIC میکرو کنترلر ----------------------- 207
این فصل شامل 9 زیرشاخه می باشد و به معرفی میکروکنترلرهای PCI پرداخته شده و در دی وی دی همراه با کتاب و به صورت فیلم های آموزشی میکروکنترلرهای AVR و ARM آموزش داده شده است .
میکروکنترلرهای قدرتمند PIC محصول شرکت میکرو چیپ می باشند. در این میکروکنترلرها قابلیت هایی همچون ADC، تایمر یا کانتر، پروتکل های ارتباطی نظیر SPI, I2C, CAN BUS, RS232, مقایسه کننده آنالوگ PWM و... تعبیه شده است. یکی دیگر از ویژگی های مهم این خانواده مصونیت بالا در برابر نویز می باشد، به گونه ای که شما می توانید از آن ها در تمامی مکان های صنعتی و ... استفاده نمایید.
1- مقدمه
2- دستورات مربوط به ADC
3- راه اندازی نوسان ساز داخلی یا Internal Oscillator
4- ارتباط سریال I2C یا Wire-2
5- پروژه راه اندازی سنسور دمای DS1621
6- ...
برای برنامه نویسی و راه اندازی این میکروکنترلرها، کامپایلرها و مفسرهای زیادی ارائه شده است. در این فصل شما با کامپایلر، مفسر یا دیباگر CCS C Compiler کار می کنید. همچنین می توانید نحوه نصب این نرم افزار را در قسمت ضمایم بیابید.
از ویژگی های این کامپایلر می توان به موارد زیر اشاره کرد:
1- دارای Help بسیار قوی
2- قابلیت برنامه نویسی به زبان های C و اسمبلی
3- دارای ادیتور پیشرفته با قابلیت شناسایی دستورات
4- دارای خروجی های COF و SYM و ... برای سایر نرم افزارهای شبیه ساز و دیباگر
5- محیط بسیار ساده و جذاب
6- دسترسی به کتابخانه ها و توانایی ویرایش آن ها
همانطور که می دانید تمامی میکروکنترلرها دارای کامپایلر C می باشند، شما می توانید یادگیری زبان برنامه نویسی C را با این کتاب شروع کنید و بعد از یادگیری کامل به سراغ دیگر میکروکنترلرها بروید.
- فصل ششم : پروژه ----------------------- 235
در این فصل با توجه به آموخته ها و اطلاعات داده شده توسط کتاب طریقه ساخت یکی از انوع ربات ها را می آموزیم که با استفاده از روش های توصیه شده در کتاب هزینه ساخت چنین رباتی تا حد زیادی کاهش می یابد .
بخش مهمی از کارایی یک ربات برای حرکت و عملکرد آن در برابر موارد گوناگون را مکانیک ربات به عهده دارد. مکانیک ربات به دو بخش استاتیک و دینامیک تقسیم بندی می شود.
استاتیک معمولا در ربات های ثابت مانند ربات بازو بررسی می گردد که شامل مفاهیمی چون نیرو، فشار و گشتاور می باشد.
دینامیک بیشتر در ربات های متحرک که منظور هر ربات با قابلیت تغییر مکان می باشد، بررسی می گردد که شامل مفاهیمی چون جابجایی، سرعت، شتاب و ... می باشد.
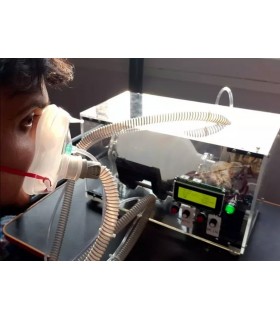
- فصل هفتم : ساخت ربات میکرو موس ----------------------- 253
در این فصل با توجه به توضیحات جامع و اطلاعات کاملی که توسط کتاب ارائه شده است میتوان یک ربات میکروموس ساخت . رباتی که در آن از سنسور مادون قرمز استفاده شده است.
1- سنسور مادون قرمز در ربات میکروموس
2- نحوه استفاده از سنسور مادون قرمز در ربات میکرو موس
3- استپ موتور Step Motor
- ضمیمه : ----------------------- 275
ضمیمه بطور کلی به توصیف 4 مورد پرداخته است :
نحوه ساخت فیبر مدارچاپی
نقشه های مدارهای الکترونیکی
سیمبل های الکترونیکی
و در قسمت پیوست معادل کلمات و اصطلاحات بکار رفته در کتاب به زبان انگلیسی آورده شده است.
در گذشته برای ساختن یک مدار الکترونیکی ابتدا نقشه مدار را روی فیبر مخصوص قرار می دادند، سپس جای پایه های المان های الکترونیکی را روی فیبر سوراخ می کردند و پایه ها را طبق نقشه از زیر با سیم به هم اتصال می دادند. این عمل به علت اشغال جای زیاد، وجود سیم های متعدد و عبور سیم ها از روی یکدیگر، پارازیت زیادی را در مدار به وجود می آورد. امروزه به علت پیشرفت علم الکترونیک و پیچیده تر شدن مدارات الکترونیکی این طریقه سیم کشی دیگر استفاده ای ندارد و از مدار چاپی استفاده می شود. در یک مدار چاپی عناصر روی یک طرف فیبر قرار می گیرند و خطوط ارتباطی به وسیله لایه نازک مسی که در طرف دیگر فیبر وجود دارد برقرار می شود، استفاده از مدار چاپی حجم مدار را کوچک می کند، علاوه بر این که در این روش می توان ذخامت و فواصل خطوط عبور جریان را به طور دقیق ترسیم کرد و مانع ایجاد ظرفیت خازنی پراکنده شد. به طور کلی مزایای مدار چاپی در مقایسه با مدارهای سیم کشی به شرح زیر است:
1- از شلوغ شدن اتصالات و سیم کشی ها جلوگیری می شود.
2- اندازه مدارها کوچک می شود.
3- به هنگام تعمیر مدار دنبال کردن خطوط به سهولت انجام می شود.
4- مونتاژ مدار سریع و آسان و مقرون به صرفه است.
5- تکثیر و تولید زیاد لوازم الکترونیکی آسان تر است.
مشخصات
- کاربری
- آموزشی
- گارانتی
- گارانتی اصالت و سلامت فیزیکی
- نویسنده
- فرشاد عسگری
- آموزش ساخت
- به همراه دی وی دی آموزشی
- ناشر
- سها دانش
- قطع کتاب
- وزیری
- نوبت و سال چاپ
- اول
- نوع چاپ
- سیاه و سفید
- سال چاپ
- 1393
- تعداد صفحات
- 304
- شابک
- 9786001811104
- نوع جلد
- شومیز













ویژگیهای فیزیکی
ویژگی های کتاب
سایر ویژگیها