



برد رزبری پای پیکو Raspberry Pi Pico W
معرفی رزبری پای پیکو Raspberry Pi Pico W
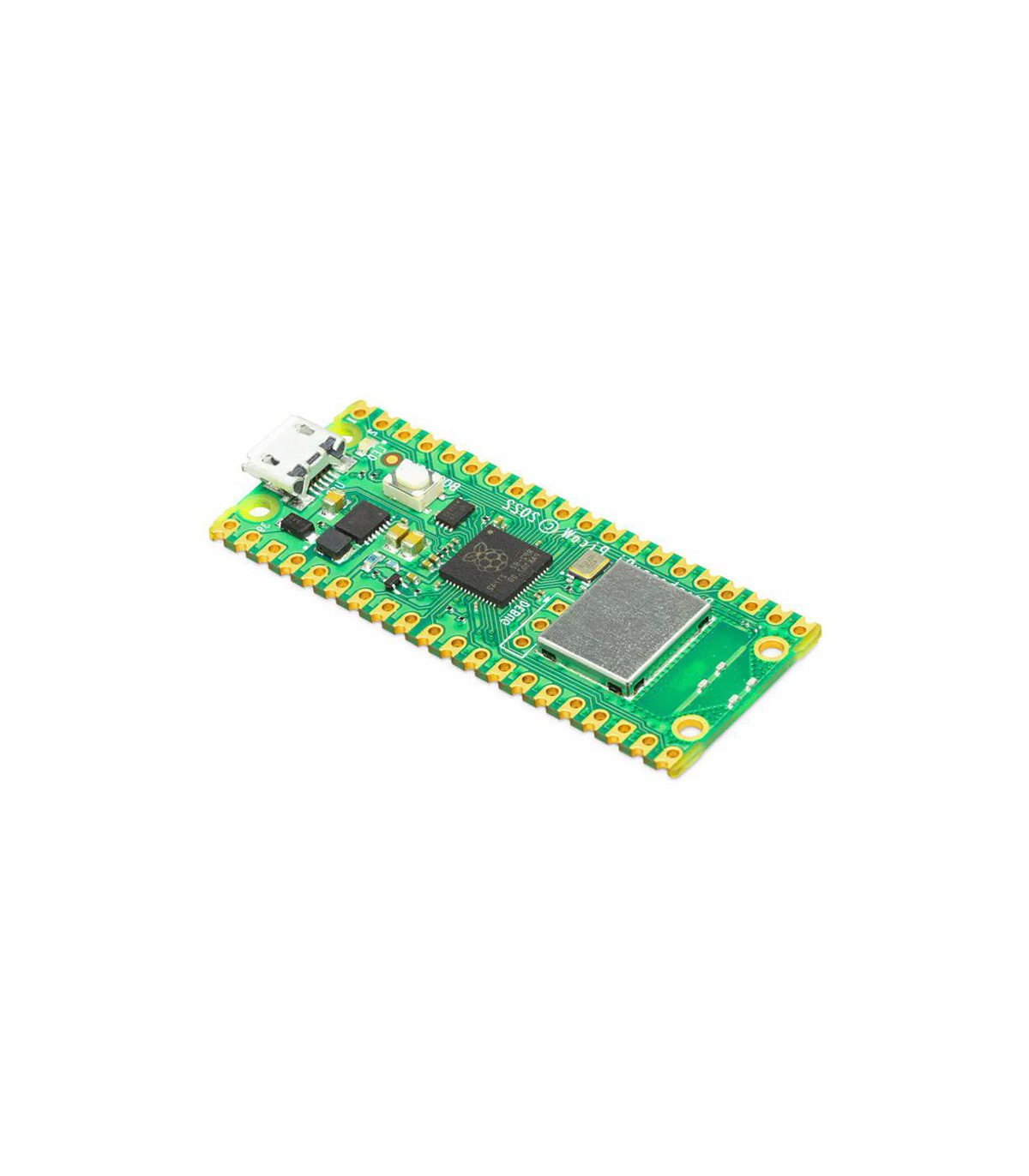
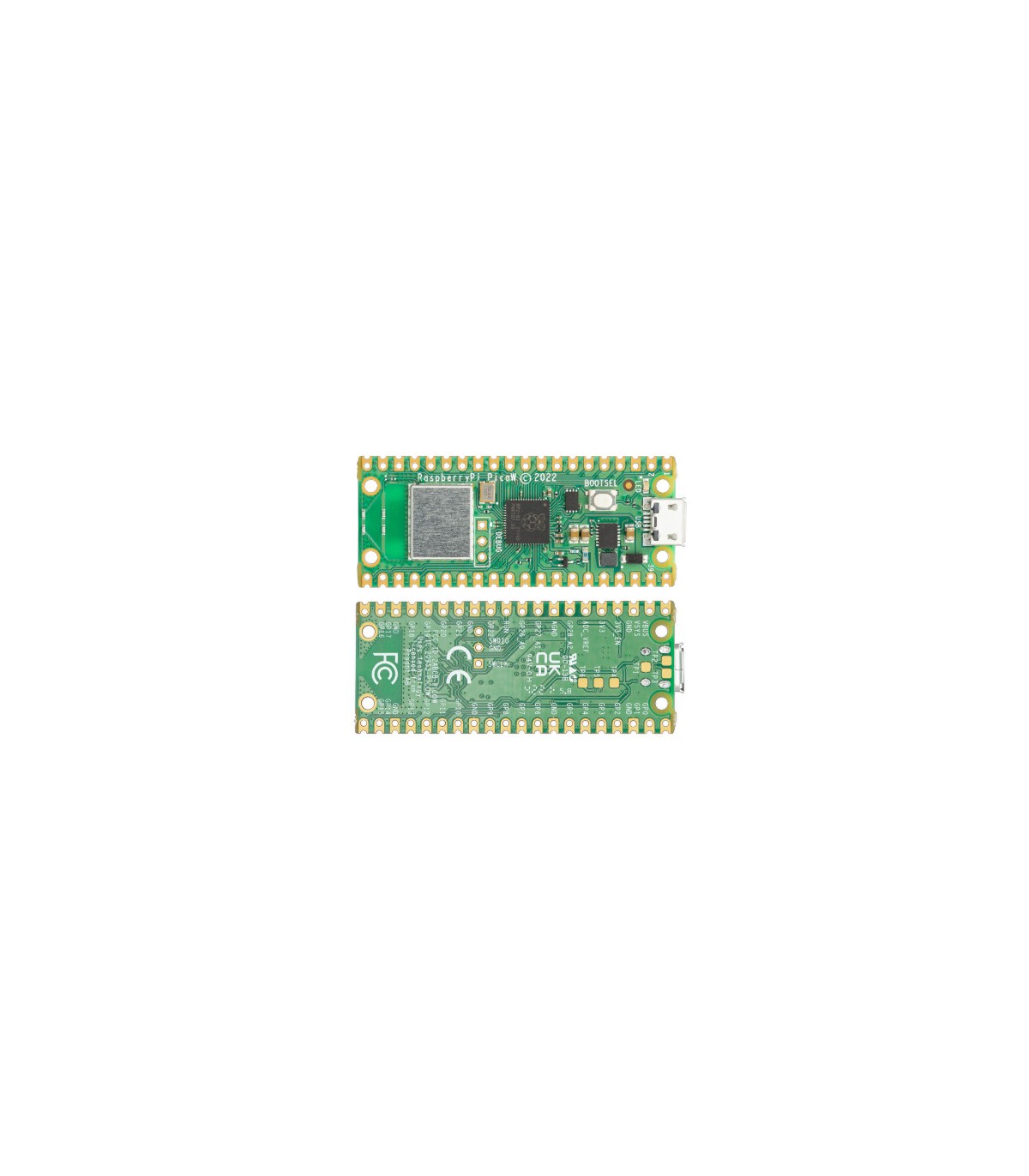
برد رزبری پای پیکو W از تراشه وای فای Wireless (802.11n), single-band (2.4 GHz) و پروتکل امنیتی WPA3 استفاده میکند. ار تراشه وای فای برای ارتباط با شبکه و پلتفرم ها در اجرای پروژه های IOT میتوان استفاده کرد. از پروتکل WPA3 جهت افزایش امنیت رمزگذاری ارتباط را امن سازی میکند. همچنین قابلیت اکسس پوینت تا چهار کلاینت را دارد. تمامی پایه های GPIO در این برد کاملا مشابه رزبری پای پیکو اولیه است و برای راه اندازی و تست تمامی مراحل مشابه است. تنها بایستی از ارتباط وایرلس برای پروژه های خود اقدامات جدیدتری انجام دهید تا ارتباط با اینترنت را برای پروژه های IOT محیا کنید. پورت micro usb مجدد برای این برد در نظر گرفته شده است و حتما بایستی از کابل های اورجینال انتقال دیتا برای ارتباط با برد رزبری پای پیکو W استفاده کنید. رزبری پای پیکو از آنتن داخلی با لایسنس ABRACON بهره برده است. تراشه وایرلس از طریق SPI به میکروکنترلر RP2040 متصل شده است. به دلیل محدودیت هایی که در پین ها وجود داشته است، برخی از پین های وایرلس مشترک هستند. CLK با VSYS به اشتراک گذاشته می شود، بنابراین تنها زمانی که پروتکل SPI در حال انجام نیست می توان VSYS را از طریق ADC خواند. برای بهترین عملکرد بهتر شبکه وایرلس، آنتن باید در فضای آزاد باشد. به عنوان مثال، قرار دادن فلز در زیر یا نزدیک آنتن می تواند عملکرد آن را هم از نظر بهره و هم از نظر پهنای باند کاهش دهد. افزودن فلز زمین شده به طرفین آنتن می تواند پهنای باند آنتن را بهبود بخشد.
مشخصات فنی معرفی رزبری پای پیکو Raspberry Pi Pico W
- پشتیبانی از میکروکنترلر RP2040 با دو مگابایت حافظه فلش
- دارای رابط وایرلس داخلی تک باند 2.4 گیگاهرتز (802.11n)
- دارای پورت micro usb B برای تغذیه Power
- دارای 26 پایه GPIO
- دارای 23 پایه فقط به صورت دیجیتال
- عملکرد 3 پایه به صورت ADC
- دارای سه پورت SWD برای دیباگ
- پردازنده دو هسته ای با فرکانس Dual-core cortex M0+ at up to 133MHz
- دارای PLL نوسان ساز کنترل شده توسط ولتاژ، مقایسه کننده فاز، تقویت کننده DC و دارای سیستم فیدبکدار جهت هم فاز شدن ورودی با خروجی
- دارای 246kb حافظه SRAM
- دارای حافظه فلش خارجی QUAD SPI
- پشتیانی از USB1.1 داخلی
- پشتیبانی از 30 پایه GPIO
- ولتاژ I/O بین 1.8 تا 3.3 ولت
- پشتیبانی از ADC 12 BIT
- دارای 2XUART
- دارای 2XSPI
- دارای 2XI2C
- دارای 16XPWM
- دارای 1xTIMER با 4XALARM
- دارای 1XREAL TIME CLOCK
- دارای 2XPIO
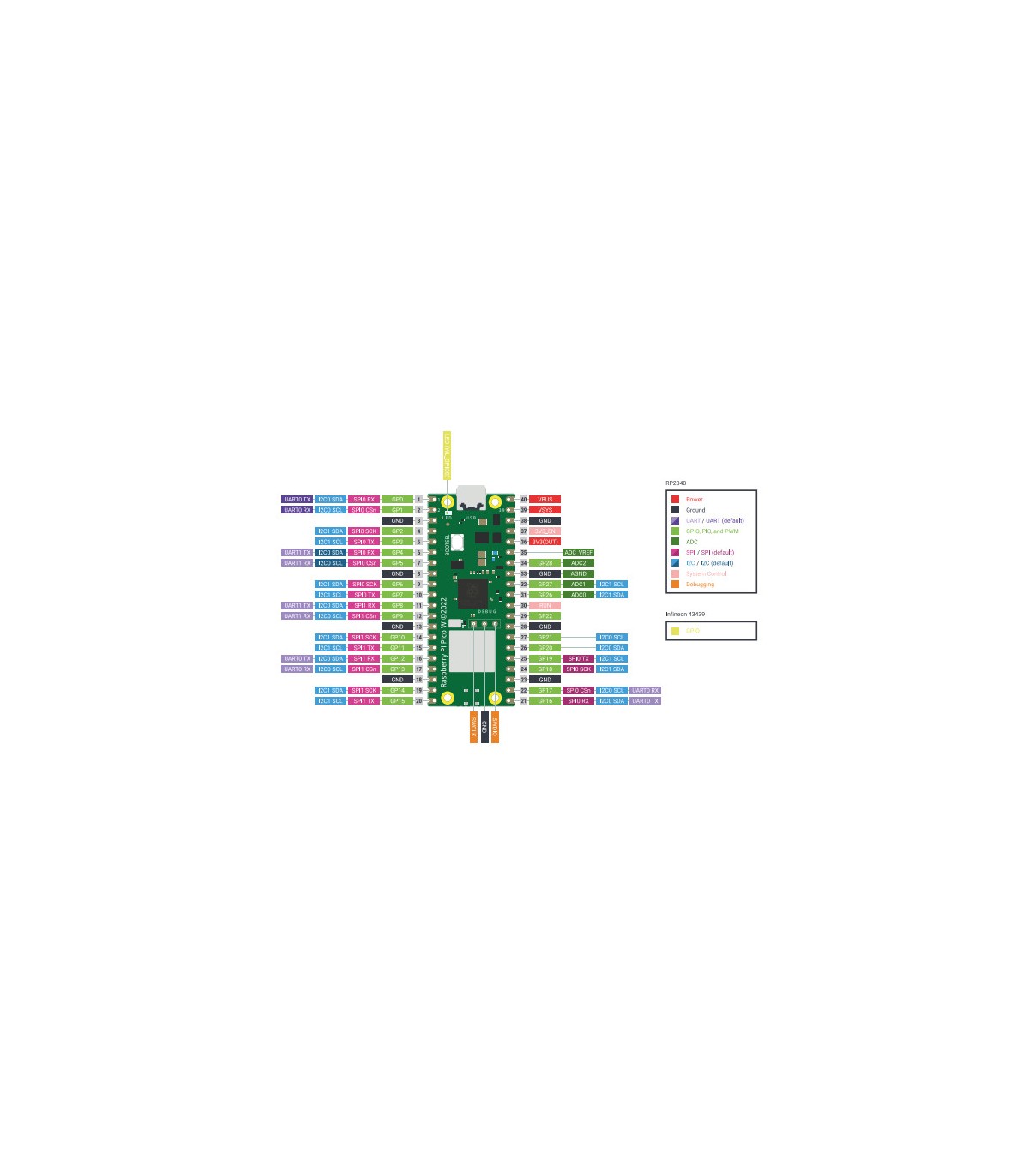
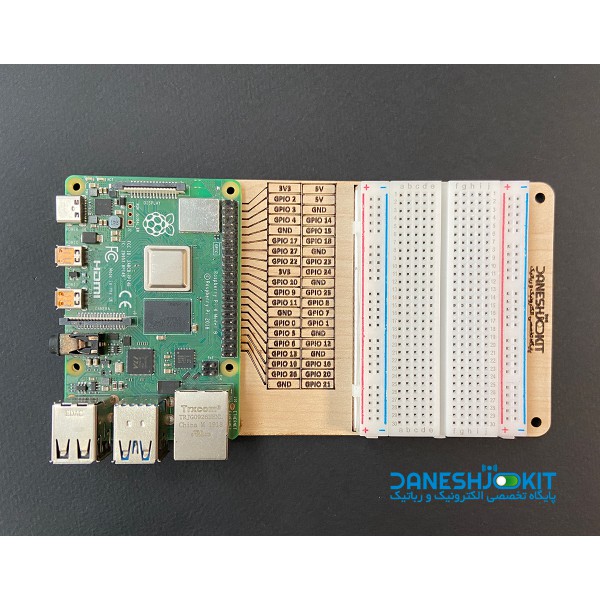
بررسی پایه های رزبری پای پیکو Raspberry Pi Pico W
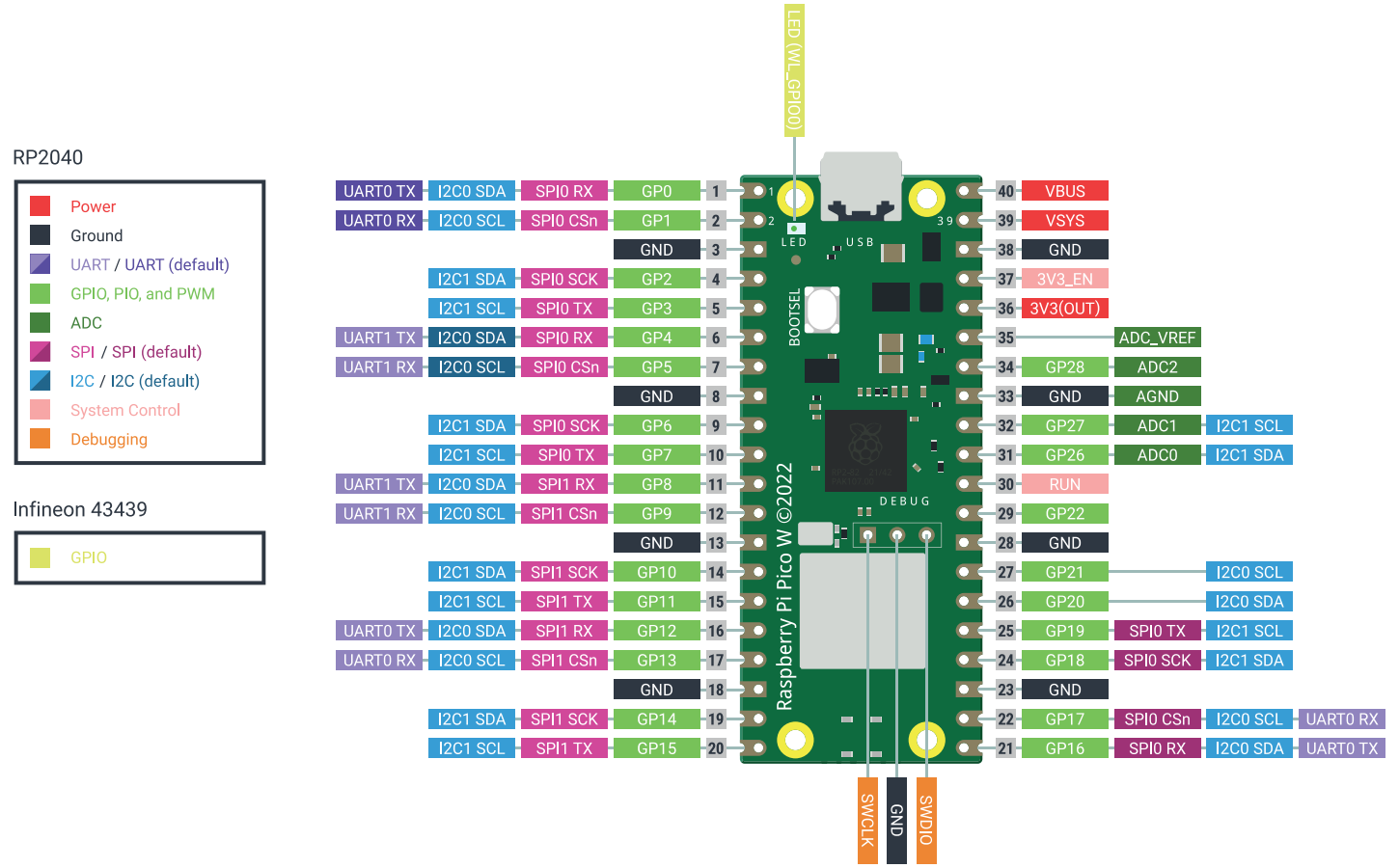
به همراه رزبری پای پیکو W چه اقلامی باید خریداری شود؟
- پین هدر
- برد بورد
- کابل فلت
راه اندازی LED Blink با میکروپایتون
در ادامه یک نمونه ساده از کد MicroPython برای روشن و خاموش کردن یک LED در Raspberry Pi Pico با استفاده از میکروپایتون آورده شده است:در این مثال، LED به پین 25 (GP25) در Raspberry Pi Pico متصل شده است. اسکریپت با استفاده از متد toggle() از کلاس Pin وضعیت LED را (روشن/خاموش) تغییر میدهد و سپس با استفاده از تابع sleep_ms() از ماژول time منتظر میماند.
import machine
import time
# پین مرتبط با LED را تعریف کنید
پین_LED = machine.Pin(25, machine.Pin.OUT)
# تاخیر بین وضعیتهای LED (به میلیثانیه)
تاخیر_میلیثانیه = 500
while True:
پین_LED.toggle() # تغییر وضعیت LED (روشن/خاموش)
time.sleep_ms(تاخیر_میلیثانیه) # تاخیر به مد
مشخصات
- کاربری
- دانشگاهی - تخصصی
- سطح تجربه مورد نیاز
- نیمه حرفه ای
- ولتاژ ورودی
- VSYS
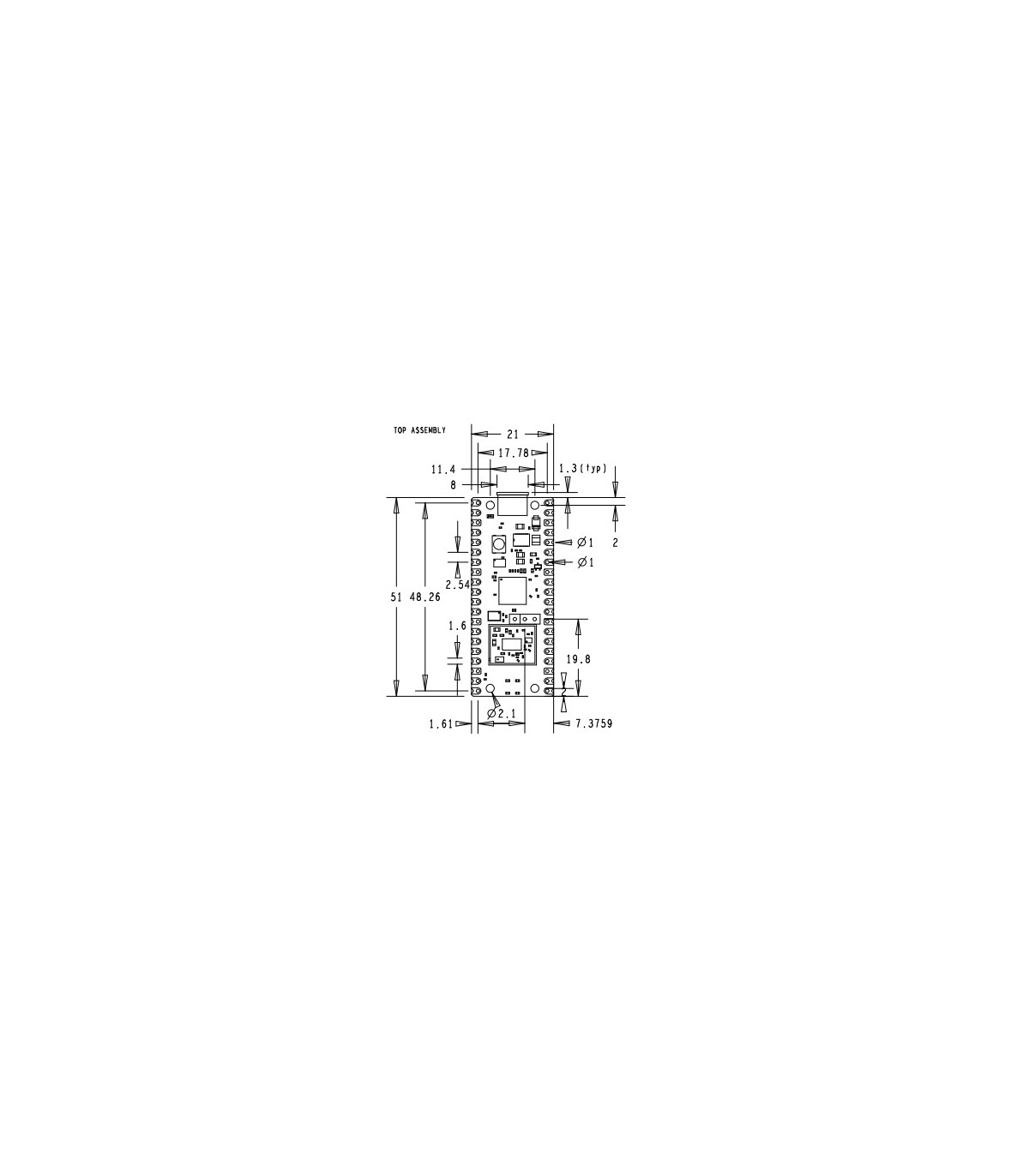
- تعداد پایه ها
- 40 پایه
- اقلام همراه محصول
- ندارد
- پردازنده
- RP2040
- Wifi
- دارد
- ورژن وای فای
- 802.11n
بله این امکان وجود دارد. با توجه به اینکه برد رزبری پای دارای پایههای GPIO است. امکان اتصال انواع ماژولهای مختلف را دارد. ماژولهای اترنت به SPI هم یکی از این موارد پر مصرف هستند. میتوانید از شاخه ماژول اترنت و شبکه انواع این بردها را برای اتصال به رزبری پای بررسی کنید.
دوربین IMX219 یک دوربین با رابط MIPI CSI-2 است که اکثرا با بردهای توسعهی مبتنی بر پردازندههای ARM که دارای رابط CSI-2 هستند، سازگاری دارد. برخی از این بردها شامل Raspberry Pi، Jetson Nano، Odroid و Orange Pi is هستند. با این حال، برای استفاده از دوربین IMX219 با هر برد دیگری، باید بررسی کنید که آیا برد شما دارای رابط MIPI CSI-2 است یا خیر. CSI2 یک رابط سریال پایدار برای انتقال داده های تصویری از سنسورهای تصویری به پردازنده ها است. برخی از بردهایی که دارای CSI2 هستند عبارتند از:
1- Raspberry Pi CM4
2- Nvidia Jetson Nano
3- Orange Pi
4- BeagleBone Black
5- Coral Dev Board
6- Qualcomm DragonBoard
7- HiKey 960
و بسیاری بردهای دیگر با پردازنده های مختلف از جمله ARM و x86.
لازم به ذکر است که برخی از این بردها ممکن است نیاز به ماژول تبدیل CSI2 به HDMI یا USB داشته باشند تا بتوانند با دوربین های دیگری که از رابط های HDMI یا USB استفاده می کنند سازگاری پیدا کنند.
باگ های نرم افزاری به مرور زمان با بهروزرسانی جدید به صورت اتوماتیک رفع خواهد شد. پیشنهاد میشود ورژن 3 را نصب کنید.
اگر نسخه 4 از Thonny IDE بر روی ویندوز 7 برای شما مشکلساز است و به دنبال جایگزینی مناسب برای توسعه میکروپایتون هستید، میتوانید از محیطهای توسعه دیگری استفاده کنید.
Mu: Mu یک محیط توسعه سبک و کم حجم برای میکروپایتون است. این نرمافزار بر روی ویندوز 7 نصب و اجرا میشود و ویژگیهای ساده و کاربرپسندی دارد.
IDLE (Integrated Development and Learning Environment): IDLE یک IDE رسمی برای میکروپایتون است و به صورت پیشفرض در همراه با نصب پایتون نصب میشود. این IDE از ورژنهای مختلف میکروپایتون پشتیبانی میکند.
Visual Studio Code (VS Code): اگر از یک IDE قدرتمند و انعطافپذیر برای توسعه میکروپایتون بهره میبرید، میتوانید از VS Code با استفاده از افزونههای مرتبط با میکروپایتون استفاده کنید. این IDE روی ویندوز 7 نیز عملکرد مناسبی دارد.
PyCharm Community Edition: اگر به دنبال یک IDE حرفهای برای توسعه پروژههای میکروپایتون هستید، میتوانید از نسخه رایگان PyCharm Community Edition استفاده کنید. این IDE ویژگیهای بسیار زیادی دارد و بر روی ویندوز 7 نیز قابل نصب است.
ارور "MPY: soft reboot" در میکروپایتون (MicroPython) به مشکلات مربوط به کد یا اشتباهات در اجرای برنامه اشاره دارد. همچنین، ارور "ImportError: can't import name pin" نیز به نشانه این است که درخواست به ایمپورت ماژول pin ناموفق بوده است.
ابتدا باید کدی که اجرا میشود را بررسی کنید. ممکن است در کد خود از ماژول pin به نادرستی استفاده کرده باشید یا اینکه این ماژول در محیط میکروپایتون مورد تعریف نشده باشد.اطمینان حاصل کنید که ماژول pin در میکروپایتون به درستی تعریف شده و موجود است. در برخی از نسخههای میکروپایتون، این ماژول ممکن است به نام machine تعریف شده باشد. بنابراین، باید از machine به جای pin استفاده کنید.










ویژگیهای فیزیکی
ارتباطات
پردازنده
تغذیه
ویژگی های فنی
سایر ویژگیها

بررسی چهار برد ارزان قیمت برای یادگیری میکروپایتون

نصب نرم افزار uPyCraft IDE برنامه نویسی میکروپایتون