

شناخت ماژول Can To TTL TJA1050
ماژول CAN TO TTL TJA1050 یک مبدل واسطه بین پروتکل CAN و TTL است. این ماژول به صورت دو سویه عمل میکند و از آن برای اتصال سیستمها و دستگاههایی که از پروتکل CAN استفاده میکنند؛ به میکروکنترلرها و دستگاههایی که از سطح TTL استفاده میکنند به کار برده میشود. معمولا این ماژول در سیستمهای خودرویی، رباتیک و صنعتی استفاده میشود.
روش کار با ماژول CAN TO TTL TJA1050
ماژول CAN TO TTL TJA1050 یک ماژول تبدیل پروتکل CAN به سطح منطقی TTL است. برای کار با این ماژول باید آن را به یک میکروکنترلر یا سایر دستگاههای الکترونیکی که از پروتکل TTL پشتیبانی میکنند، متصل کرد. برای اتصال این ماژول به میکروکنترلر، باید سیگنالهای TX و RX ماژول به پینهای معینی از میکروکنترلر متصل شوند. علاوه بر این، برای استفاده از پروتکل CAN نیاز است تا برنامهای که در میکروکنترلر اجرا میشود، از این پروتکل پشتیبانی کند و از کتابخانههای مربوطه استفاده کند. بعد از اتصال ماژول به میکروکنترلر، میتوان با استفاده از دستورات مربوطه در کد، پیامهای CAN را دریافت و ارسال کرد. برای این کار، باید مقادیر مشخصی را برای آدرس، داده و سایر پارامترهای مورد نیاز در نظر گرفته و آنها را به صورت باینری در قالب پیام CAN ارسال کنید. به طور کلی، برای کار با ماژول CAN TO TTL TJA1050 باید دانش کافی در زمینه پروتکل CAN و برنامهنویسی میکروکنترلر داشته باشید. همچنین باید دقت کنید که اتصال نادرست این ماژول به میکروکنترلر میتواند باعث خرابی آن شود.
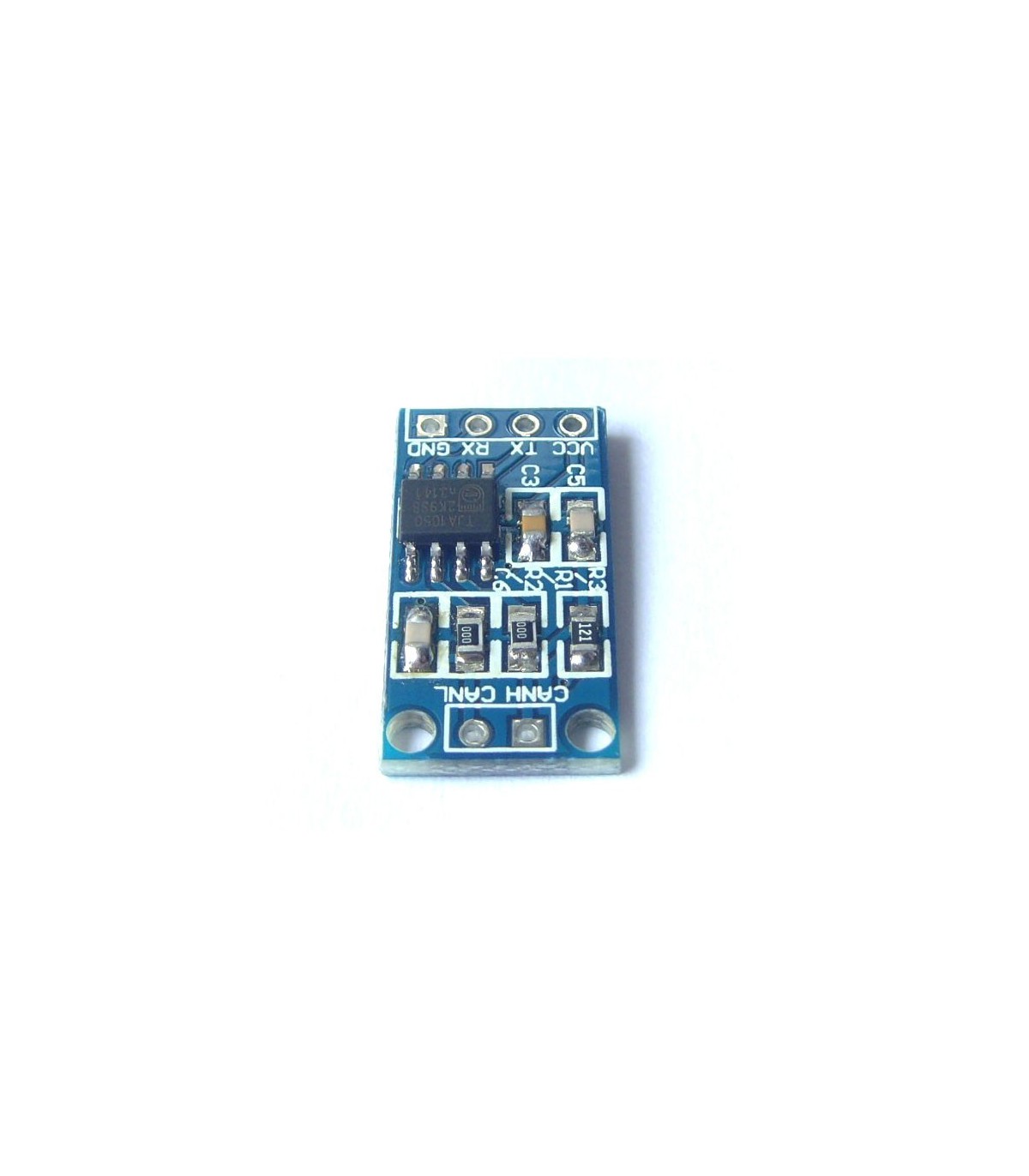
پایه های pinout ماژول CAN TO TTL TJA1050
ماژول CAN TO TTL TJA1050 شامل 4 پایه به شرح زیر است.
پایه VCC: این پایه برای اتصال به منبع تغذیه 5 ولت استفاده می شود.
پایه GND: این پایه برای اتصال به زمین مشترک استفاده می شود.
پایه RXD: این پایه برای دریافت داده های ورودی از واسط CAN استفاده می شود.
پایه TXD: این پایه برای ارسال داده های خروجی به واسط CAN استفاده می شود.
در این ماژول، پایه های VCC و GND به ترتیب به منابع تغذیه 5 ولت و زمین مشترک متصل میشوند. همچنین پایه RXD به پایه TX واسط CAN متصل میشود و پایه TXD به پایه RX واسط CAN متصل میشود. این ماژول برای استفاده با میکروکنترلرهایی مانند آردوینو و بردهای STM32 و ... استفاده میشود.
سرعت تبادل ماژول CAN TO TTL TJA1050
ماژول CAN TO TTL TJA1050 قابلیت پشتیبانی از سرعت های مختلف تبادل داده در شبکه CAN را داراست. در این ماژول سرعت تبادل داده میان دستگاه های مختلف به وسیله نرخ انتقال بیت (Bit Rate) اندازه گیری می شود. حداکثر نرخ انتقال بیت ممکن برای این ماژول 1 مگابیت در ثانیه (1 Mbps) می باشد. اما می توان با تنظیم پارامترهای مختلف این سرعت را کاهش یا افزایش داد.
به همراه ماژول can to ttl ja1050 چه اقلامی باید خریداری شود؟
1- برد توسعه با قابلیت اتصال به اینترنت مانند آردوینو، ESP32 یا RP2040
2- کابل USB برای اتصال برد توسعه به کامپیوتر
3- کابل های مورد نیاز برای اتصال ماژول به برد توسعه و سایر قطعات
4- منبع تغذیه مناسب برای تامین برق مورد نیاز برد توسعه و ماژول. (اگر برد توسعه شما از USB تغذیه می شود، منبع تغذیه مورد نیاز نیست)
5- نرم افزار مورد نیاز برای برنامه نویسی برد توسعه (مثل Arduino IDE برای آردوینو)
6- کتابخانه های مربوط به ماژول CAN to TTL JA1050 برای برنامه نویسی.
برنامه نویسی ماژول CAN TO TTL TJA1050 با آردوینو
برای برنامهنویسی ماژول CAN TO TTL TJA1050 با آردوینو، میتوانید از کتابخانه MCP_CAN استفاده کنید. این کتابخانه امکان برقراری ارتباط با ماژول CAN را با استفاده از پروتکل SPI برای آردوینو فراهم میکند. ابتدا باید کتابخانه MCP_CAN را به آردوینو اضافه کنید. برای این منظور، می توانید فایل zip کتابخانه را از آدرس https://github.com/coryjfowler/MCP_CAN_lib/archive/master.zip دریافت کنید و آن را در مسیر Documents/Arduino/libraries/ نصب کنید. سپس با اتصال ماژول CAN به آردوینو، برنامهی زیر را برای فرستادن داده از طریق ماژول CAN به یک دستگاه دیگر اجرا کنید.
#include <SPI.h>
#include <mcp_can.h>
// set the CS pin of the CAN module
const int CAN_CS_PIN = 10;
MCP_CAN can(CAN_CS_PIN); // initialize the CAN module with the CS pin
void setup()
{
Serial.begin(9600);
while (!Serial);
// initialize the CAN module
if (can.begin(MCP_ANY, CAN_500KBPS, MCP_16MHZ) == CAN_OK)
Serial.println("CAN module initialized successfully");
else
Serial.println("CAN module initialization failed");
}
void loop()
{
unsigned char msg[8] = {1, 2, 3, 4, 5, 6, 7, 8}; // the message to be sent
// send the message with ID = 0x100
can.sendMsgBuf(0x100, 0, 8, msg);
Serial.println("Message sent successfully");
delay(1000); // wait for 1 second before sending the next message
}
در این برنامه، ابتدا پین CS ماژول CAN به پین 10 آردوینو متصل شده است. در تابع setup، ماژول CAN با سرعت 500 کیلوبیت بر ثانیه و با استفاده از فرکانس 16 مگاهرتز شروع به کار می کند. در تابع loop، یک پیام 8 بایتی با شناسه 0x100 به دستگاه دیگری فرستاده می شود. با استفاده از تابع sendMsgBuf می توانید داده های خود را برای فرستادن از طریق ماژول CAN تنظیم کنید.
روش راه اندازی ماژول CAN TO TTL TJA1050 در میکروپایتون با esp32
برای راه اندازی ماژول CAN TO TTL TJA1050 در میکروپایتون با esp32، ابتدا باید کتابخانه CAN bus را نصب کنید. به عنوان مثال، می توانید از کتابخانه py-can استفاده کنید که می توانید آن را با استفاده از دستور زیر نصب کنید:
pip install py-canسپس، می توانید کد زیر را برای راه اندازی ماژول CAN TO TTL TJA1050 با esp32 در میکروپایتون استفاده کنید:
import can
import machine
# تعریف پایه های CAN
can1_tx = 26
can1_rx = 27
# تعریف پورت ها با استفاده از پایه های تعریف شده
can1 = can.CAN(bustype='HALFDUPLEX', channel=0, bitrate=500000, tx=can1_tx, rx=can1_rx)
# ارسال داده ها
can_data = [0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08]
can_frame = can.Message(arbitration_id=0x123, data=can_data, is_extended_id=False)
can1.send(can_frame)
در این کد، ابتدا پایه های CAN برای ارتباط با ماژول تعریف شده است. سپس، با استفاده از تابع CAN، پورت های ارتباطی تعریف شده و داده ها ارسال می شوند. در نهایت، یک پیام با یک شناسه خاص و داده های مشخص ایجاد می شود و به عنوان یک فریم CAN به ماژول ارسال می شود. لازم به ذکر است که باید از طریق اتصالات مناسب، پایه های ماژول CAN TO TTL TJA1050 به پایه های تعریف شده در کد متصل شوند.
برنامه نویسی ماژول CAN TO TTL TJA1050 با میکروپایتون و rp2040
برای برنامهنویسی ماژول CAN TO TTL TJA1050 با میکروپایتون و RP2040، شما به ماژول TJA1050 و همچنین یک برد توسعه RP2040 و کابل USB به Micro-USB برای برقراری ارتباط میکروکنترلر با کامپیوتر نیاز دارید. همچنین، باید کتابخانه MCP2515 را از اینجا https://pypi.org/project/mcp2515/ دانلود و نصب کنید. سپس میتوانید با استفاده از کد زیر، ماژول TJA1050 را با RP2040 ارتباط برقرار کنید و پیامهای CAN را دریافت کنید.
import can
from machine import Pin
import utime
# Initialize CAN bus
can0 = can.CAN(0, baudrate=250_000)
# Set up the TJA1050 pins
tja1050_cs = Pin(5, Pin.OUT)
tja1050_cs.value(1)
# Define the TJA1050 commands
CMD_RESET = bytearray([0xC0, 0x00, 0x00, 0x00])
CMD_READ_STATUS = bytearray([0xA0, 0x00, 0x00, 0x00])
CMD_READ_RX_BUF = bytearray([0x90, 0x00, 0x00, 0x00])
# Define the TJA1050 register addresses
REG_MODE_CONTROL = 0x0F
REG_STATUS = 0x0E
# Reset the TJA1050
tja1050_cs.value(0)
can0.write(CMD_RESET)
tja1050_cs.value(1)
# Set the TJA1050 to normal mode
tja1050_cs.value(0)
can0.write(bytearray([0x02, 0x0F, 0x00, 0x01]))
tja1050_cs.value(1)
while True:
# Read the TJA1050 status
tja1050_cs.value(0)
can0.write(CMD_READ_STATUS)
status = can0.readinto(bytearray(1))[0]
tja1050_cs.value(1)
# If there is a message in the RX buffer, read it
if status & 0x01:
tja1050_cs.value(0)
can0.write(CMD_READ_RX_BUF)
msg = can0.read()
tja1050_cs.value(1)
print(msg)
utime.sleep(0.1)
در این کد، ابتدا کتابخانه can و machine را وارد کرده و سپس CAN bus را با baudrate 250,000 با استفاده از پورت 0 روی RP2040 شروع میکنیم. سپس پینهای مربوط به ماژول TJA1050 را به RP2040 اختصاص میدهیم.
مشخصات
- کاربری
- صنعتی
- نوع ماژول
- مبدل
- ابعاد فیبر
- 22 * 11 میلی متر
- تعداد فیبر
- 1 عدد
- سطح تجربه مورد نیاز
- نیمه حرفه ای
- فیبر مدار چاپی
- فایبر گلاس دورو متالیزه
- چاپ مس
- دارای چاپ آبی
- ترتیب پایه ها
- 6 پایه
- کشور سازنده
- چین
- نوع کانکتور
- پین هدر
- تعداد ورودی
- 2
- تعداد خروجی
- 2
دستگاه FMB920 دادههای موقعیت و وضعیت خودرو را ارسال میکند. برای مشاهده این دادهها باید دستگاه به سرور و اپلیکیشن یا سامانه ردیابی متصل شود. در صورت تمایل میتوانید به هنگام خرید گزینهی به همراه اپلیکیشن را انتخاب کنید.
بله، اما این حالت بیشتر برای کاربران فنی مناسب است. کاربر عمومی برای مشاهده خودرو روی نقشه، دریافت گزارش و مدیریت هشدارها معمولا به اپلیکیشن یا پنل ردیابی نیاز دارد.
توسط همین ماژول هم میتوانید اقدام به اجرای درخواستتان کنید. البته اگر فقط بخواهید یک سلول باتری لیتیومی را مدیریت شارژ کنید، همان گزینه ماژول TP4056 مناسب خواهد بود.
امکان راه اندازی چند سنسور DHT با ESP8266 با استفاده از MicroPython وجود دارد. سنسورهای DHT با پروتکل دیجیتال و از طریق پایههای GPIO قابل اتصال به میکروکنترلرها هستند.
برای ساخت یک سیستم کنترل دما با برد میکروکنترلر ESP32، به موارد زیر نیاز دارید:
یک برد میکروکنترلر ESP32
یک سنسور دما مثل DHT DS18B20
یک المان سرد کننده
با استفاده از کتابخانه DHT.h، میتوانید از سنسور دما برای خواندن دمای محیط استفاده کنید. سپس، میتوانید از این دما برای کنترل المان گرمایشی یا سرمایشی استفاده کنید.
در خصوص برنامه نویسی از کتابخانه DHT و در صورت نیاز کتابخانه وای فای برای ارسال دادهها به پلتفرم IoT باید استفاده کنید.



















ویژگیهای فیزیکی
ارتباطات
ویژگی های فنی
سایر ویژگیها

میدونی کاربرد مبدل سریال به USB چیه؟