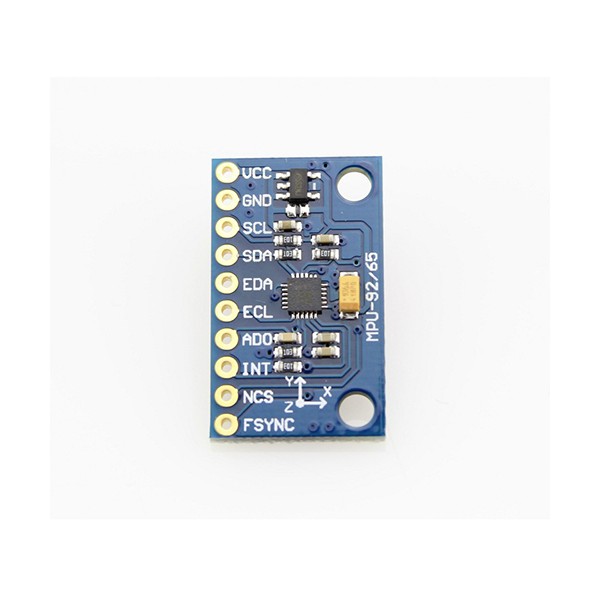




ماژول IMU اینرسی Comet-1100 سنجش شیب، شتاب و سرعت زاویه ای
برای این کالا امکان انتخاب محدوده اندازه گیری سرعت زاویه ای برای حسگر ژایروی سامانه به میزان 250 درجه بر ثانیه، 500 و 1000 و 2000 درجه بر ثانیه فراهم است. همچنین برای محدوده اندازه گیری شتاب ها هم محدودهی 2g و 4g و 8g و 16g فراهم و قابل انتخاب است. حسب نیاز پس از خرید این موارد با خریدار هماهنگی میشوند.
ماژول اینرسی سنجش شیب، شتاب و سرعت زاویه ای
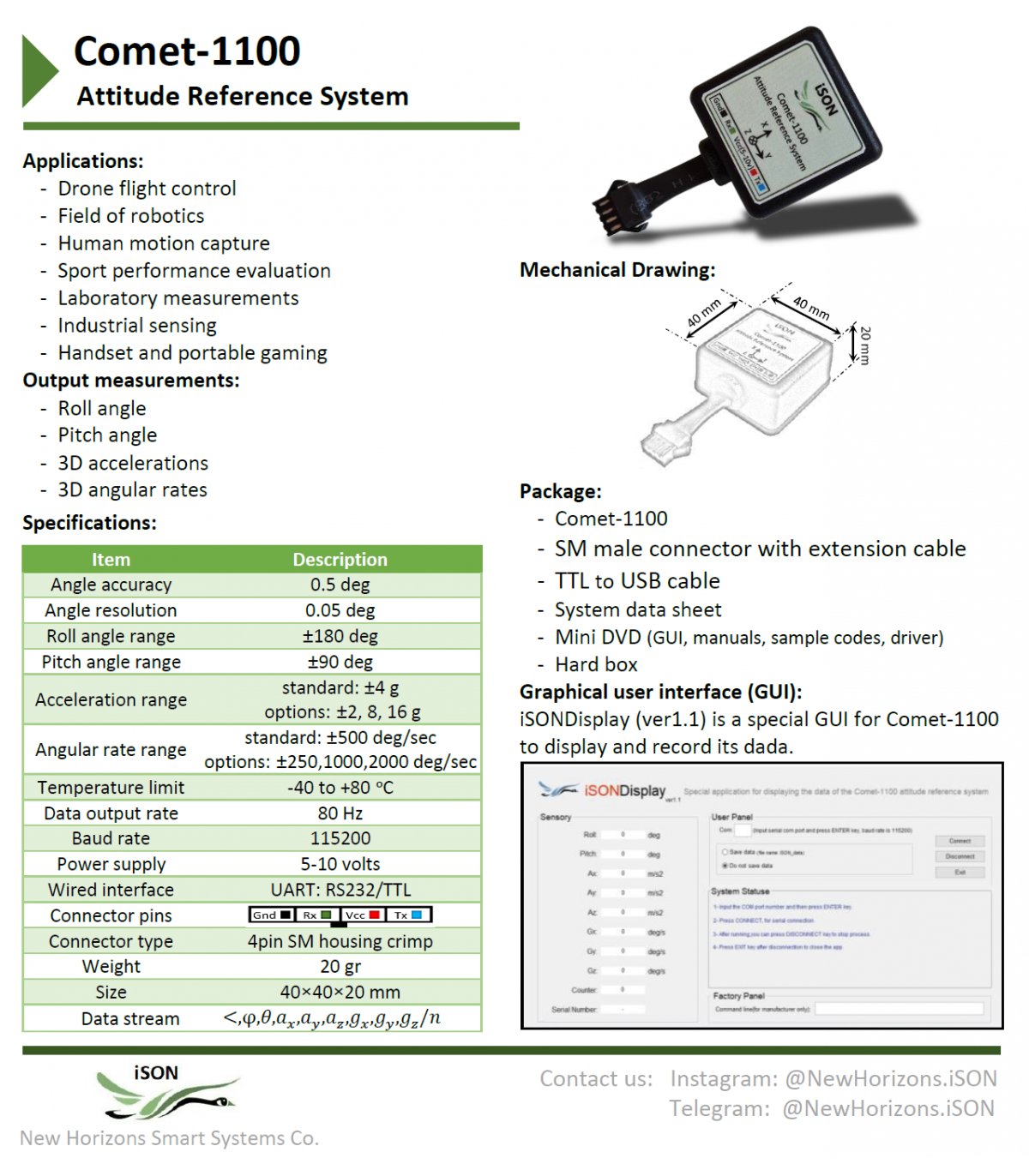
سیستم تعیین وضعیت اینرسی Comet-1100 با استفاده از مجموعه حسگرهای اینرسی شامل شتابسنجها و جایروها و استفاده از الگوریتمهای ریاضی تخمین بهینه و تلفیق اطلاعات، قادر به تعیین زوایای شیب روبات یا پلتفرم حامل این سیستم بصورت بلادرنگ است. تعیین وضعیت در واقع به معنی تعیین و اندازهگیری زوایای شیب در دو جهت رول و پیچ پلتفرم میباشد. این سیستم علاوه بر تعیین وضعیت، شتابها و سرعتهای زاویه پلتفرم را در سه جهت اندازهگیری میکند. دادههای اندازهگیری شده به صورت سریال روانه درگاه خروجی این سیستم میشود تا قابل استفاده بصورت زمانحقیقی و بلادرنگ گردد.
کاربردهای ماژول شتاب سنج و زاویه سنج
- استفاده در اتوپایلوت کلیه روباتهای زمینی و روباتهای هوایی (مولتیروتورها، پهپادها)
- اندازهگیری و اخذ اطلاعات حرکات بدن یا سوژه (در مهندسی پزشکی و در انیمیشنسازی)
- استفاده در وسایل و کنسولهای بازی
- اندازهگیریهای صنعتی و آزمایشگاهی
کمیتهای اندازهگیری شده توسط Comet-1100
کمیتهای اندازهگیری شده توسط Comet-1100 در دو حالت دینامیکی (پلتفرم در حال حرکت) و حالت استاتیکی (پلتفرم در حال سکون) بهطور خلاصه عبارتند از:
- اندازهگیری زاویه رول (Roll)
- اندازهگیری زاویه پیچ (Pitch)
- اندازه گیری شتاب در سه جهت x، y، z
- اندازه گیری سرعت زاویهای در سه جهت x، y، z
نحوه استفاده از Comet-1100
سیستم Comet-1100 به دو صورت قابل بکارگیری است.
الف- سیستم Comet-1100 در اتصال با یک برد پردازشگر میزبان
در این حالت کاربری، این سیستم به صورت یک ماژول بوده که دادههای خروجی خود را از درگاه سریال برد پردازشگر میزبان (به عنوان نمونه آردوینو مدل مگا) وارد این پردازشگر میکند. به عنوان نمونه این برد پردازشگر میزبان میتواند یک سیستم اتوپایلوت یک روبات هوایی (مولتی روتور) باشد که برای کنترل مولتیروتور، نیاز به اطلاعات وضعیت پرنده (رول و پیچ) دارد.
ب- سیستم Comet-1100 در اتصال با رایانه
چنانچه کاربر مایل باشد که اطلاعات Comet-1100 را روی کامپیوتر یا لپتاپ مشاهده نماید لازم است با استفاده از مبدل TTL به USB، سیستم Comet-1100 را به پورت USB رایانه میزبان متصل نماید. بعد از نصب اپلیکیشن اختصاصی این سیستم یعنی iSONDisplay (ver1.1) روی رایانه میزبان، خروجی سیستم قابل مشاهده و قابل ضبط روی رایانه میزبان خواهد شد. با استفاده از سایر نرمافزارهای کاربردی قرایت پورت سریال نظیر هایپرترمینال نیز اطلاعات Comet-1100 قابل مشاهده خواهد بود.
|
Description |
Item |
|
0.5 deg |
Angle accuracy |
|
0.05 deg |
Angle resolution |
|
±180 deg |
Roll angle range |
|
±90 deg |
Pitch angle range |
|
±4 g |
Acceleration range |
|
±500 deg/sec |
Angular rate range |
|
-40 to +80 oC |
Temperature limit |
|
80 Hz |
Data output rate |
|
115200 |
Baud rate |
|
5-10 volts |
Power supply |
|
UART: RS232/TTL |
Wired interface |
| Gnd-Rx-Vcc-Tx |
Connector pins |
|
4pin SM housing crimp |
Connector type |
|
20 gr |
Weight |
|
40×40×20 mm |
Size |
مشخصات
- کاربری
- صنعتی
- نوع ماژول
- شتاب و ژایرو
- ابعاد
- mm 40*40*20
- ولتاژ ورودی
- 5-11 volts
- کشور سازنده
- ایران
- وزن
- 20 gr
- نوع سنسور
- تیلت و تشخیص کجی
شتاب سنج
ژایرو
دستگاه FMB920 دادههای موقعیت و وضعیت خودرو را ارسال میکند. برای مشاهده این دادهها باید دستگاه به سرور و اپلیکیشن یا سامانه ردیابی متصل شود. در صورت تمایل میتوانید به هنگام خرید گزینهی به همراه اپلیکیشن را انتخاب کنید.
بله، اما این حالت بیشتر برای کاربران فنی مناسب است. کاربر عمومی برای مشاهده خودرو روی نقشه، دریافت گزارش و مدیریت هشدارها معمولا به اپلیکیشن یا پنل ردیابی نیاز دارد.
امکان راه اندازی چند سنسور DHT با ESP8266 با استفاده از MicroPython وجود دارد. سنسورهای DHT با پروتکل دیجیتال و از طریق پایههای GPIO قابل اتصال به میکروکنترلرها هستند.
برای ساخت یک سیستم کنترل دما با برد میکروکنترلر ESP32، به موارد زیر نیاز دارید:
یک برد میکروکنترلر ESP32
یک سنسور دما مثل DHT DS18B20
یک المان سرد کننده
با استفاده از کتابخانه DHT.h، میتوانید از سنسور دما برای خواندن دمای محیط استفاده کنید. سپس، میتوانید از این دما برای کنترل المان گرمایشی یا سرمایشی استفاده کنید.
در خصوص برنامه نویسی از کتابخانه DHT و در صورت نیاز کتابخانه وای فای برای ارسال دادهها به پلتفرم IoT باید استفاده کنید.