






توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
گیربکس سرو موتور پلاستیکی است.
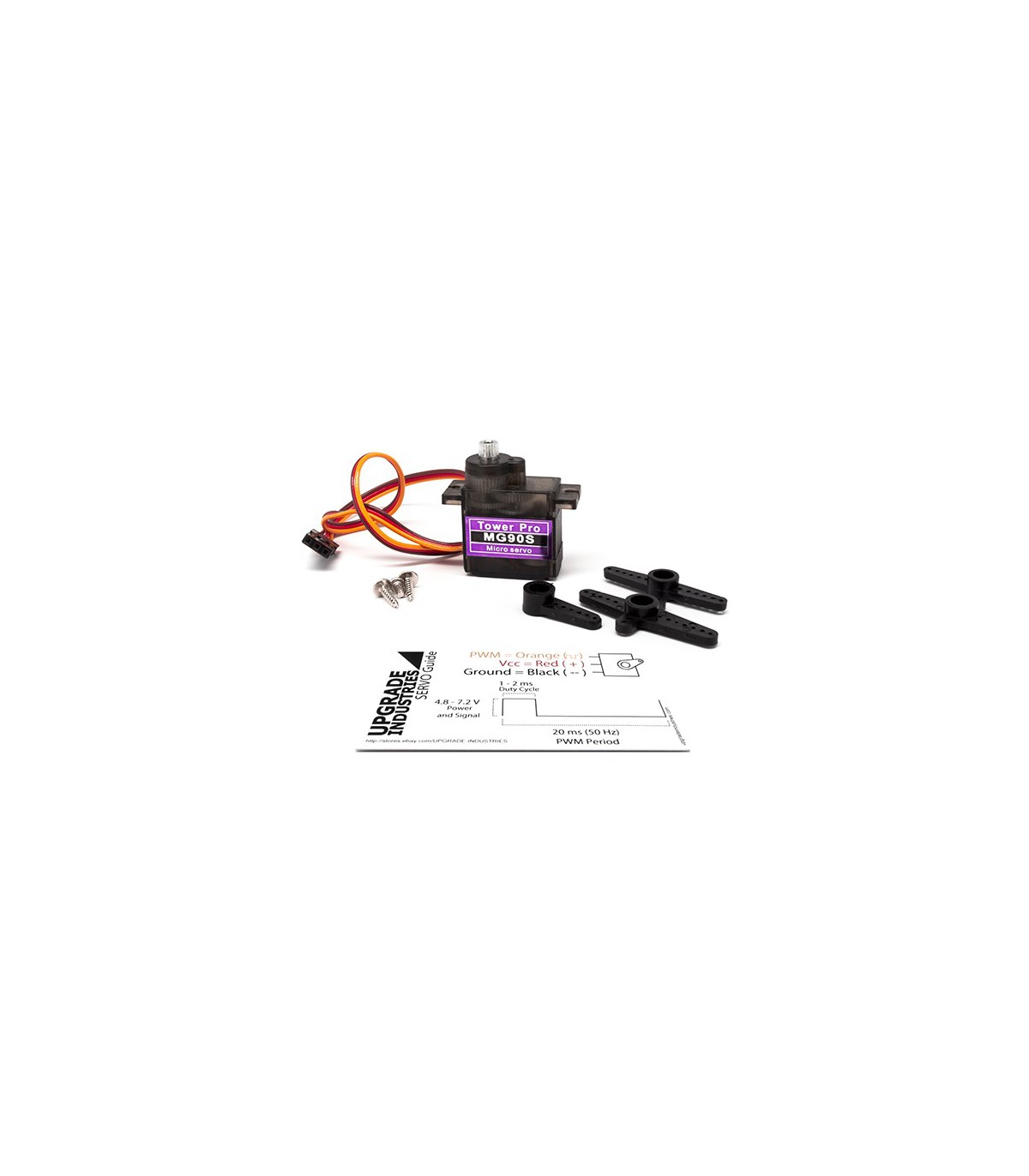
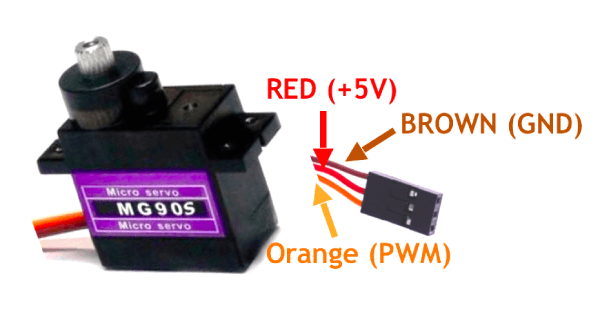
سروموتور MG90S یک سروموتور روتاری کوچک است که برای استفاده در پروژههای الکترونیکی و رباتیکی طراحی شده است. این سروموتور یک سروموتور تغذیه ۴.۸ تا ۶ ولتی است و با سیگنال پالسی که به آن اعمال میشود، جابجایی دقیق را انجام میدهد.MG90S دارای ۳ سیم متصل به میکروکنترلر یا برد کنترل است که شامل سیم قرمز (VCC)، سیم قهوهای (GND) و سیم نارنجی (سیگنال) است. سیم VCC به سطح تغذیه مثبت متصل میشود، سیم GND به مرجع منفی و سیم سیگنال به یک پین PWM میکروکنترلر یا برد کنترل متصل میشود.MG90S قادر به چرخش در بازه ۱۸۰ درجه است، یعنی میتواند به سمت راست و چپ بچرخد. همچنین، دارای گیربکس داخلی است که قابلیت افزایش گشتاور و کاهش سرعت را فراهم میکند. این سروموتور در برخی از کاربردها نیاز به استفاده از مکانیزمهای دیگر مانند کاتالوگ و دنده دارد.
این کد از کتابخانه Servo استفاده میکند تا سروموتور را کنترل کند. در setup()، سروموتور به پین سیگنال (در این مورد پین 9) متصل میشود. سپس در loop()، سروموتور به سه زاویه 0، 90 و 180 درجه حرکت میکند، و هر بار برای 1 ثانیه توقف میکند.
#include <Servo.h>
Servo myServo; // ایجاد یک شیء سرو
int servoPin = 9; // پین سیگنال سروموتور
void setup() {
myServo.attach(servoPin); // اتصال سروموتور به پین سیگنال
}
void loop() {
// حرکت به زاویه 0 درجه
myServo.write(0);
delay(1000); // توقف به مدت 1 ثانیه
// حرکت به زاویه 90 درجه
myServo.write(90);
delay(1000); // توقف به مدت 1 ثانیه
// حرکت به زاویه 180 درجه
myServo.write(180);
delay(1000); // توقف به مدت 1 ثانیه
}
توجه این کد برای بردهای ESP, RP2040 یکسان است. این کد از کتابخانه Adafruit CircuitPython استفاده میکند تا سروموتور را کنترل کند. در ابتدا، پین سیگنال سروموتور (در این مورد پین D9) به عنوان یک خروجی PWMOut تنظیم میشود. سپس یک شیء سرو به وسیله این پین ساخته میشود.در حلقه while True، سروموتور به سه زاویه 0، 90 و 180 درجه حرکت میکند، و بین هر حرکت، برای 1 ثانیه توقف میکند.
import time
import board
import pwmio
from adafruit_motor import servo
pwm = pwmio.PWMOut(board.D9, frequency=50) # پین سیگنال سروموتور به عنوان PWMOut تنظیم شود
my_servo = servo.Servo(pwm)
while True:
# حرکت به زاویه 0 درجه
my_servo.angle = 0
time.sleep(1) # توقف به مدت 1 ثانیه
# حرکت به زاویه 90 درجه
my_servo.angle = 90
time.sleep(1) # توقف به مدت 1 ثانیه
# حرکت به زاویه 180 درجه
my_servo.angle = 180
time.sleep(1) # توقف به مدت 1 ثانیه
مشخصات
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم