توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
توجه: ممکن است کالای دریافتی در اسم چاپ شده روی سرو، با تصویر سایت متفاوت باشد.
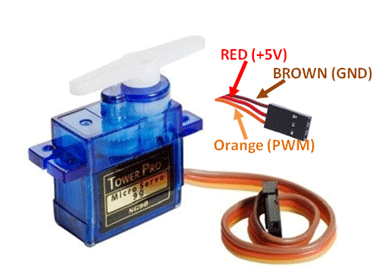
میکرو سرو موتور SG90 با زاویه 180 درجه و برند TZT است. ولتاژ کاری میکرو سرو موتور 4.8 تا 7.2 ولت DC است. سرو موتور دارای سه کابل قهوه ای ، نارنجی و قرمز است. کابل نارنجی ورودی پالس است و تعذیه میکرو سرو موتور از کابل قرمز تامین میشود. سرعت سرو موتور در ولتاژ 4.8 ولت 0.12 ثانیه بر 60 درجه است. گشتاور سرو موتور در ولتاژ 4.8 ولت 1.2 - 1.4 kg / cm است. دمای کاری - 30 تا + 60 درجه سانتی گراد است. جنس دنده میکرو سرو موتور پلاستیکی است و همراه با آن پک شافت و پیچ ارسال خواهد شد.
سروموتور SG90 یک سروموتور کوچک و ارزان قیمت است که در بسیاری از پروژههای الکترونیکی، رباتیکی و کنترل حرکت استفاده میشود. برخی از ویژگیهای این سروموتور عبارتند از:
ظرفیت بار: SG90 قابلیت تحمل بار حداکثر ۱۲۵ گرم را داراست.
زاویه چرخش: این سروموتور با زاویه چرخش ۱۸۰ درجه عمل میکند.
سرعت: سرعت حرکت SG90 در حالت عادی حدود ۶۰ درجه در ثانیه است.
ولتاژ کاری: این سروموتور با ولتاژ ۴.۸ تا ۶ ولت کار میکند.
مصرف جریان: مصرف جریان این سروموتور در حالت عادی حدود ۱۰۰ میلی آمپر است.
سروموتور SG90 دارای ۳ پایه میباشد که به شرح زیر هستند:
در این کد نیز مانند کدهای قبل از کتابخانه Servo استفاده شده است تا سرو موتور SG90 کنترل شود. در ابتدای کد یک شیء سرو موتور با نام servo ایجاد شده و با استفاده از متغیر servoPosموقعیت اولیه سرو موتور تنظیم شده است.در تابع setup()، سرو موتور به پین دیجیتال 9 برد آردوینو متصل شده و با استفاده از تابع write() موقعیت اولیه سرو موتور تنظیم میشود.در تابع loop()، با استفاده از دو حلقه for، سرو موتور به صورت رفت و برگشتی از 0 تا 180 درجه و سپس از 180 تا 0 درجه حرکت میکند. با استفاده از تابع write()، موقعیت سرو موتور تنظیم شده و با تابع delay() برای 15 میلی ثانیه منتظر میماند. میتوان مقدار زمان تأخیر را برای تغییر سرعت حرکت سرو موتور تغییر داد.
#include <Servo.h> Servo servo; // ایجاد شیء سرو موتور int servoPos = 0; // تنظیم موقعیت اولیه سرو موتور void setup() { servo.attach(9); // اتصال سرو موتور به پین دیجیتال 9 servo.write(servoPos); // تنظیم موقعیت اولیه سرو موتور } void loop() { for (int i = 0; i < 180; i++) { // حرکت سرو موتور از 0 تا 180 درجه servo.write(i); // تنظیم موقعیت سرو موتور delay(15); // انتظار برای 15 میلی ثانیه } for (int i = 180; i > 0; i--) { // حرکت سرو موتور از 180 تا 0 درجه servo.write(i); // تنظیم موقعیت سرو موتور delay(15); // انتظار برای 15 میلی ثانیه } }
این کد از ماژول machine استفاده میکند تا به پایههای ESP32 دسترسی پیدا کرده و سیگنال PWM را روی پایه 2 تنظیم کند. کلاس PWM برای ایجاد یک شی PWM استفاده میشود و سپس با تغییر سیکل کاری سیگنال PWM ، موقعیت سرو تنظیم میشود.سرو در دو حلقه حرکت میکند، یک حلقه از ۰ تا ۱۸۰ درجه و دیگری از ۱۸۰ تا ۰ درجه. ماژول time برای افزودن تأخیر کوچکی بین هر تغییر موقعیت استفاده میشود.
from machine import Pin, PWM import time # Configure PWM pin servo_pin = Pin(2) servo_pwm = PWM(servo_pin, freq=50) # Set initial servo position servo_pwm.duty(77) # Move servo from 0 to 180 degrees for i in range(0, 180, 1): # Convert degrees to PWM duty cycle duty = int(i / 180 * 115) + 77 servo_pwm.duty(duty) time.sleep_ms(10) # Move servo from 180 to 0 degrees for i in range(180, 0, -1): # Convert degrees to PWM duty cycle duty = int(i / 180 * 115) + 77 servo_pwm.duty(duty) time.sleep_ms(10) # Set servo back to initial position servo_pwm.duty(77) # Cleanup servo_pwm.deinit()
این کد از ماژول machine استفاده میکند تا به پایههای ESP32 دسترسی پیدا کرده و سیگنال PWM را روی پایه 2 تنظیم کند. کلاس PWM برای ایجاد یک شی PWM استفاده میشود و سپس با تغییر سیکل کاری سیگنال PWM ، موقعیت سرو تنظیم میشود.سرو در دو حلقه حرکت میکند، یک حلقه از ۰ تا ۱۸۰ درجه و دیگری از ۱۸۰ تا ۰ درجه. ماژول time برای افزودن تأخیر کوچکی بین هر تغییر موقعیت استفاده میشود.
import machine import utime servo_pin = machine.Pin(2) servo_pwm = machine.PWM(servo_pin) servo_pwm.duty_u16(5500) for i in range(0, 181, 1): duty = int(5500 + i * 10.27) servo_pwm.duty_u16(duty) utime.sleep_ms(10) for i in range(180, -1, -1): duty = int(5500 + i * 10.27) servo_pwm.duty_u16(duty) utime.sleep_ms(10) servo_pwm.duty_u16(5500) servo_pwm.deinit()
مشخصات
| نام فروشنده | زمان ارسال | موجودی | قیمت | خرید |
|---|---|---|---|---|
|
الکترونیک دانشجو کیت
|
آماده ارسال | 2 | 297,500 تومان |
297,500 تومان
افزودن به سبد خرید
|
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم