



کیت ربات مسیریاب آنالوگ
یک عدد ربات مسیریاب با 3 سنسور فتودیودی و ظاهری شبیه به مکعب با دو عدد موتور و دو عدد چرخ، که مسیر رنگی را روی یک سطح صاف دنبال می کند.عملکرد مدار بسیار ساده می باشد. این گجت توسط سنسور خود یک خط سیاه را رد یابی کرده و بر روی آن حرکت می کند. هرگاه از مسیر خط کشی شده منحرف شود، در جهت بازگشت به مسیر مشخص شده، تلاش می کند و تا به مسیرش باز نگردد، تلاش ادامه دارد. البته عکس این محصول فقط جهت نمایش روش کار روبوت است.
عملکرد ربات مسیریاب
این ربات (Hyper Tracer) از "مکانیزم دندهها" جهت انتقال قدرت استفاده میکند. برای انتقال نیرو حداقل به دو چرخ دنده نیاز است. سادهترین چرخدنده، "چرخ دنده ساده" نام دارد. نوع دیگری از چرخ دندهها، چرخ دنده مارپیچ نام دارد که شبیه یک پیچ است. انواع دیگری از دندهها مانند مخروطی، حلزونی و ... نیز وجود دارند. سیستم حرکت هر چرخ Hyper Tracer از دو جزء تشکیل شده است که یکی از آنها دنده مارپیچ متصل به محور موتور و دیگری دنده ساده متصل به محور چرخ میباشد. بطور کلی دندههای درگیر در هر مکانیزم باید طوری ساخته شوند که از لحاظ شکل، ابعاد، ارتفاع دندانه و خصوصیاتی از این قبیل با یکدیگر متناسب باشند. ویژگیهای اساسی دندهها عبارتند از:
۱-دو دنده ساده درگیر با هم، جهت چرخش را تغییر میدهند یعنی اگر یک دنده در جهت عقربههای ساعت بچرخد، دنده دیگر خلاف عقربههی ساعت میگردد. در دندههای ساده محور دندهها با یکدیگر موازی هستند؛ حال آنکه چرخ دندههای مارپیچ درگیر با دنده ساده علاوه بر تغییر جهت چرخش، محور دوران را نیز به اندازه 90 تغییر میدهند.
۲-تغییر سرعت دوران، وقتی یک دنده ساده با 10 دندانه با یک دنده ساده دیگر با 40 دندانه درگیر میشود سرعت دوران دنده کوچکتر 4 برابر سرعت دنده بزرگتر است. در نتیجه نسبت تبدیل دو چرخ دنده از نسبت تعداد دندانههای آن دو بدست میآید. در دندههای مارپیچ این رابطه پیچیدهتر است؛ در سیستم مارپیچ و دنده رباتی که در اختیار دارید نسبت کاهش سرعت دوران برابر یک به تعداد دندانههای دنده ساده است که 48/1 میباشد.
۳- تغییر "قدرت پیچش" که به آن "گشتاور" نیز میگویند. موتورهای استفاده شده در اکثر ربات ها توان کمی دارند و به اندازه کافی قدرت حرکت چرخ ها را ندارند. پس نیازمند آنیم که نیروی موتور را افزایش دهیم.
"یک اهرم بلند و یک تکیهگاه محکم به من بدهید تا زمین را از جای خود تکان دهم؟!
حرکت Hyper Tracer
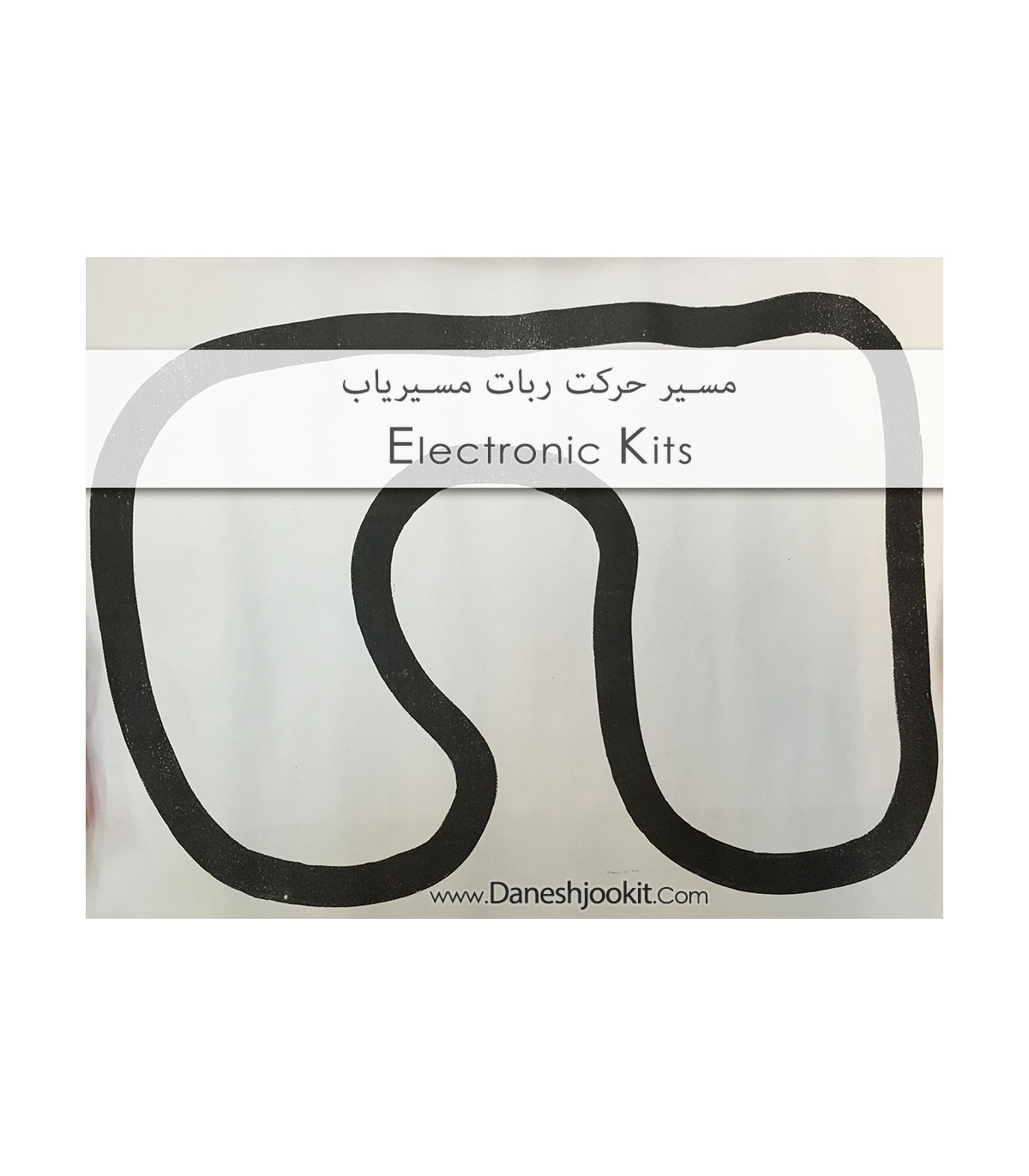
مکانیزم Hyper Tracer بر اساس دو چرخ طراحی شده است. دو عدد لغزنده نیز به صورت نیمکره در کف ربات تعبیه شدهاند تا تعادل ربات روی زمین برقرار گردد. در رباتهای دو چرخ در صورت به راه افتادن هر دو چرخ با سرعت یکسان، ربات روی یک خط مستقیم حرکت میکند و در صورتی که تنها یکی از چرخها بچرخد، ربات حول چرخ دیگر شروع به چرخش میکند. هنگامی که سرعت چرخها یکسان نباشد، ربات مسیر منحنی شکلی را طی خواهد کرد. همچنین در صورتی که یکی از چرخها با سرعت یکسان ولی عکس چرخ دیگر دوران کند ربات حول مرکز خود میگردد. پس این ربات میتواند با چرخش و حرکت مستقیم هر مسیری را طی کند. Hyper Tracer طوری طراحی شده است که یک مسیر سیاه رنگ بر روی زمینه سفید را دنبال میکند. ربات شما از دو سنسور گیرنده مادون قرمز که در کف ربات موتاژ شده است برای دیدن خط استفاده مینماید. وقتی Hyper Tracer در ابتدای مسیر روشن میشود، شروع به حرکت مستقیم میکند. این حرکت مادامیکه هر دو سنسور ربات بر روی خط قرار داشته باشند، ادامه مییابد. در صورتی که مثلاً سنسور سمت چپ از خط سیاه خارج شود. موتور سمت راست خاموش میشود و در نتیجه ربات به سمت راست میپیچد و مسیر خود را اصلاح میکند. این ربات نمونهای از رباتهای متحرک بشمار میرود و میتواند با نصب تجهیزات دیگر به یک ربات متحرک قابل برنامهریزی توسّط کامپیوتر تبدیل شود. همچنین با امکناتی مانند دوربین و امکانات مخابراتی این ربات میتواند به یک ربات فوتبالیست نیز تبدیل گردد!!
مشخصات
- تعداد قطعات
- 71
- ابعاد فیبر
- 4 * 8
- تعداد فیبر
- 1
- سطح تجربه مورد نیاز
- پیشرفته
- ولتاژ مورد نياز
- برای هر موتور 3 ولت DC
- جنس مواد اولیه
- ABS و پلی اتیلن و تکه های فلزی
- طول کابل
- 8 رشته سیم 15 سانتی متری
- فیبر مدار چاپی
- یک رو استخوانی
- کشور سازنده
- ایران
- نوع کیت
- مونتاژ سازه و نیازمند لحیم کاری









ویژگیهای فیزیکی
تغذیه
سایر ویژگیها