





توجه: قیمت و موجودی به روز است و فروش حضوری نداریم. ساعات پاسخگویی از 9 تا 4 عصر
یک عدد ربات روبوبال یا همان توپ رباتیک که بدون هیچ مدار الکترونیکی، فقط با پیروی از اصول مکانیکی یک گشتاور را از موتور الکتریکی به بدنه توپ رباتیک منتقل می کند. پس از برخورد با یک مانع عقب کشی می کند و با گشتاور بیشتری به حرکت ادامه می دهد و اینقدر ادامه می دهد تا از مانع عبور کند.
شرح تخصصی عملکرد ربات:
۱-جعبه دنده چگونه کار میکند: موتوری که برای رباتتان استفاده میکنید، به تنهایی نیروی کافی برای راه انداختن ربات ندارد. به نیروی گردشی است اصطلاحاً گشتاور گفته میشود.
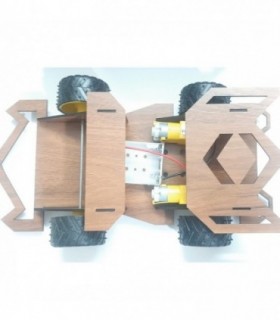
موتور با سرعت بسیار زیادتر و نیروی بسیار کمتر از آنچه که برای راهانداختن ربات مورد نیاز است میچرخد. حاصل ضرب سرعت در نیروی یک موتور توان نام دارد. برای افزایش نیرو و کاهش سرعت به همان نسبت، از جعبه دنده استفاده میشود. در شکل زیر مدل گسترده جعبه دندهی ربات شما نشان داده شده است. همانطور که دیده میشود، ابتدا به کمک پولی و تسمه سرعت موتور به یک چهارم کاهش مییابد. هر یک از چرخدندههایی که شما در جعبه دندهتان بکار گرفتهاید از دو دنده تشکیل شدهاند که تعداد دندانههای دنده کوچکتر دقیقاً نصف تعداد دندانههای دنده بزرگتر است. بنابراین دنده کوچک باید دو دور بچرخد تا دنده بزرگ در گیر با آن یک دور بچرخد. پس در هر مرحله سرعت موتور نصف میشود و نیروی آن دو برابر.
نیروی خروجی جعبه دنده از محورهای خروجی گرفته میشود. بنابراین این محورها باید به چرخ دندههای مورد نظر محکم متصل شده باشند. معمولاً از جعبه دنده فقط یک خروجی گرفته میشود ولی شما میتوانید از جعبه دنده خود دو خروجی بگیرید. برای عوض کردن نسبت کاهش سرعت جعبه دنده کافیست که جای دندههای خروجی را به کمک چکش تغییر دهید.
۲- توپ رباتیک چگونه کار میکند: کیت آموزشی توپ رباتیک به کمک ذخیره و آزاد کردن انرژی مکانیکی موانع را تشخیص میدهد و با نیروی کافی از آنها عبور میکند. برای آشنایی با طرز کار ربات ابتدا باید با برخی مفاهیم علم مکانیک آشنا شوید.
توانایی یک جسم برای انجام کار انرژی نام دارد. انرژی انواع مختلفی دارد و میتواند از نوعی به نوع دیگر تبدیل شود. از جمله انواع انرژی میتوان انرژی جنبشی و انرژی پتانسیل را نام برد. هر جسمی که حرکت کند دارای انرژی جنبشی است. هرچه سرعت حرکت بیشتر باشد، انرژی جنبشی جسم هم است. انرژی پتانسیل هر جسم بر اساس ارتفاع آن از سطح زمین تعریف میشود. هرچه جسم بالاتر رود انرژی پتانسیل آن بیشتر میشود. هنگامی که یک جسم از ارتفاع سقوط میکند انرژی پتانسیل آن به انرژی جنبشی تبدیل میشود. برای ساده شدن مسایل فیزیکی معمولاً فرض میشود که کل جرم یک جسم در یک نقطه متمرکز است. این نقطه مرکز ثقل نام دارد. به این صورت میتوان سرعت و ارتفاع را برای مرکز ثقل جسم تعیین کرد.
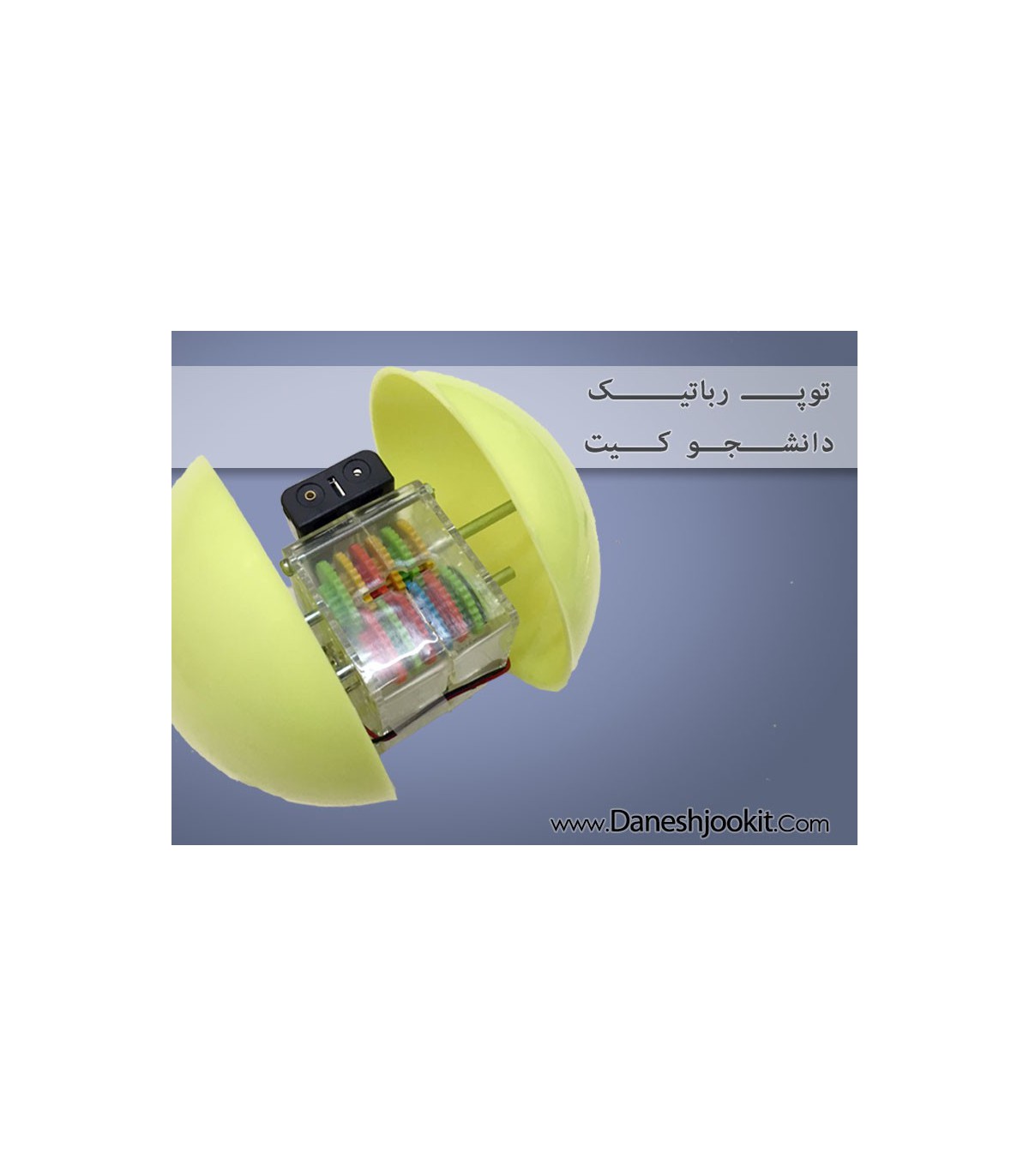
توپ رباتیک طوری طراحی شده است که مرکز ثقل آن توسّط موتور جابجا میشود. هنگامی که ربات را خاموش بر روی زمین قرار دهید، در حالتی قرار میگیرد که مرکز ثقف آن دقیقاً بالای تکیهگاه است. پس از روشن کردن مرکز ثقل اندکی حول مرکز دوران ربات میگردد. در حقیقت ربات شروع به ذخیره انرژی پتانسیل میکند. در صورتی که ربات بر روی یک سطح صاف قرار گیرد، این انرژی تبدیل به انرژی جنبشی میشود و ربات به مانعی برخورد کند، ذخیره انرژی تا جایی ادامه پیدا میکند که مرکز ثقل ربات به بالاترین نقطه میرسد. سپس کل انرژی پتانسیل ربات به انرژی جنبشی تبدیل میشود.
ولی این بار ربات در جهت مخالف حرکت میکند. کل انرژی ربات حاصل جمع انرژی جنبشی و پتانسیل آن است. هنگامی که ربات در برابر مانع متوقف میشود انرژی به صورت پتانسیل در آن ذخیره میشود و در برخورد بعدی با مانع به انرژی جنبشی ربات افزوده میشود.
مشخصات
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم