






توجه: عکس این کالا فقط برای نمایش نوع باتری است. اطلاعات روی تصویر ملاک انتخاب نیست. عدد روی باتری 503759
توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
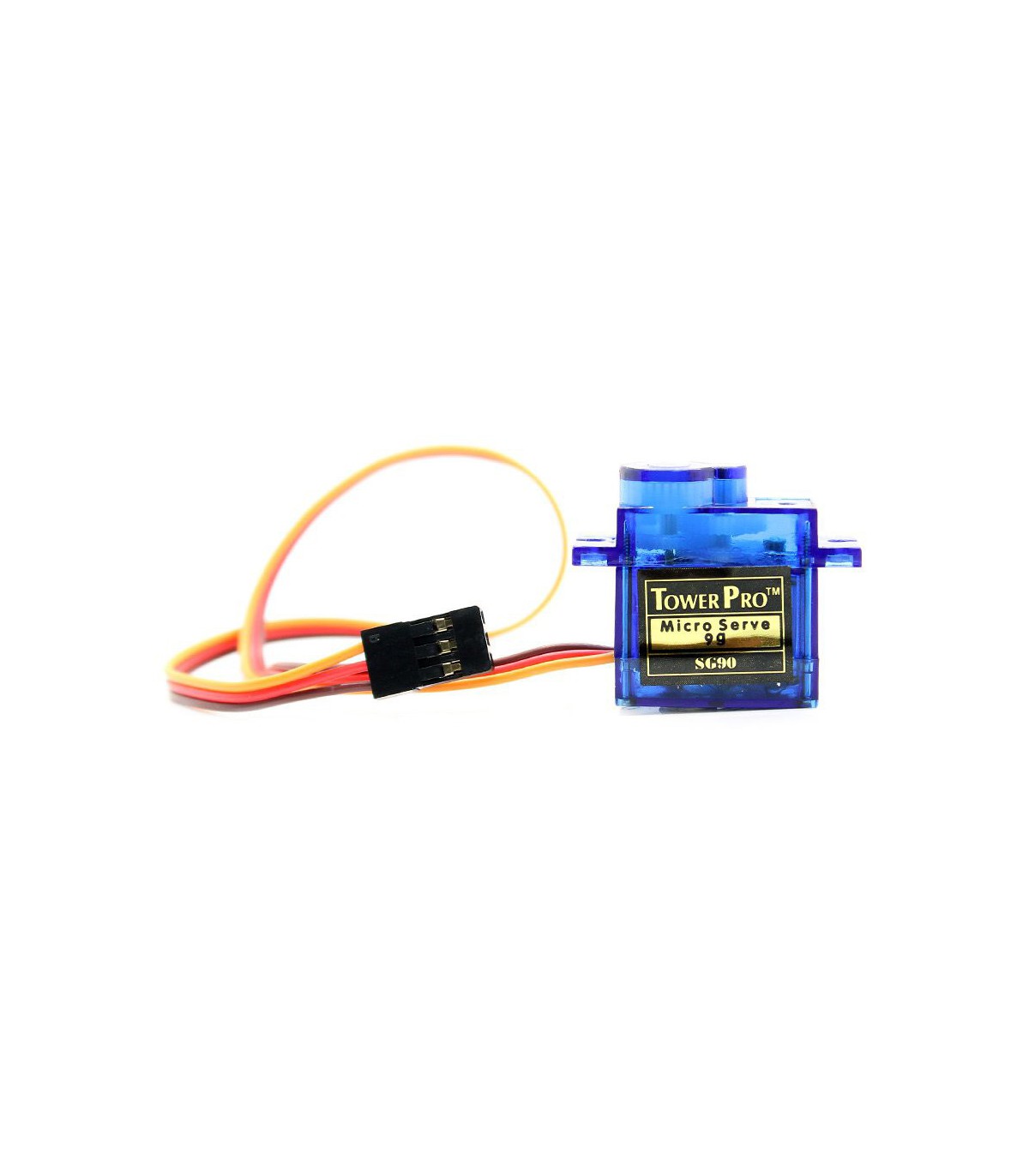
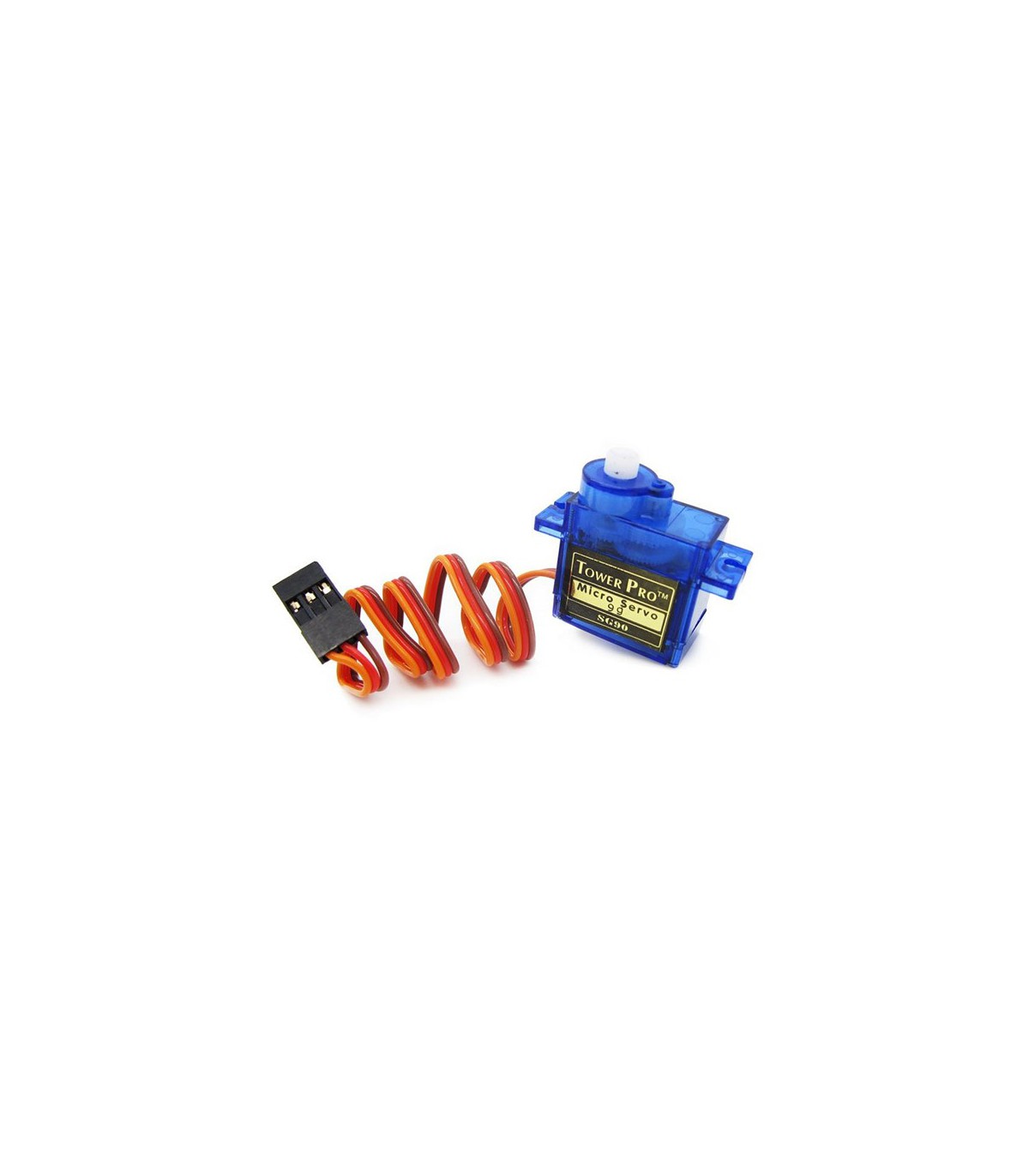
برخلاف ابعاد بسیار کوچک این میکرو سرو موتور قدرت خروجی آن باور نکردنی است. شافت خروجی سرو موتور SG90 Servo Motor دارای 180 درجه قابلیت چرخش دارد. برای راه اندازی باید از کتابخانه سرو موتور Servo Motor استفاده کرد. کتابخانه سرو به صورت پیش فرض در نرم افزار آردوینو موجود میباشد. این سرو انتخاب مناسبی برای تازه کارها و کسانی که میخواهند به دنیای رباتیک وارد شوند میباشد.
برای راه اندازی سرو موتور 180 درجه با استفاده از آردوینو میتوانید از کتابخانه Servo استفاده کنید. این کتابخانه در آردوینو به صورت پیشفرض وجود دارد و نیازی به نصب جداگانه ندارد. برای استفاده از این کتابخانه، کافی است در کد خود، ابتدا کتابخانه Servo را اضافه کنید. برای مثال، کد زیر سرو موتور 180 درجه را با استفاده از پین 9 آردوینو کنترل میکند:
#include <Servo.h>
Servo myServo;
void setup() {
myServo.attach(9); // متصل کردن سرو موتور به پین 9
}
void loop() {
myServo.write(0); // تنظیم زاویه سرو موتور به 0 درجه
delay(1000); // تأخیر 1 ثانیه
myServo.write(180); // تنظیم زاویه سرو موتور به 180 درجه
delay(1000); // تأخیر 1 ثانیه
}
کد بالا به سرو موتور این دستورات را میدهد. در حالت اول، سرو موتور به زاویه 0 درجه تنظیم میشود. در حالت دوم، سرو موتور به زاویه 180 درجه تنظیم میشود. توجه داشته باشید که ممکن است برای تنظیم زاویه سرو موتور، به جای عدد 180، عدد دیگری را انتخاب کنید. این بستگی به نوع سرو موتوری دارد که شما دارید و باید دستیابی به دیتاشیت آن داشته باشید.
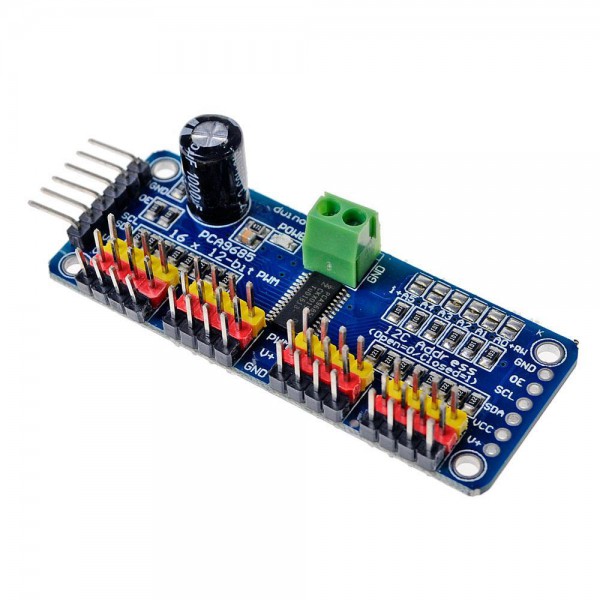
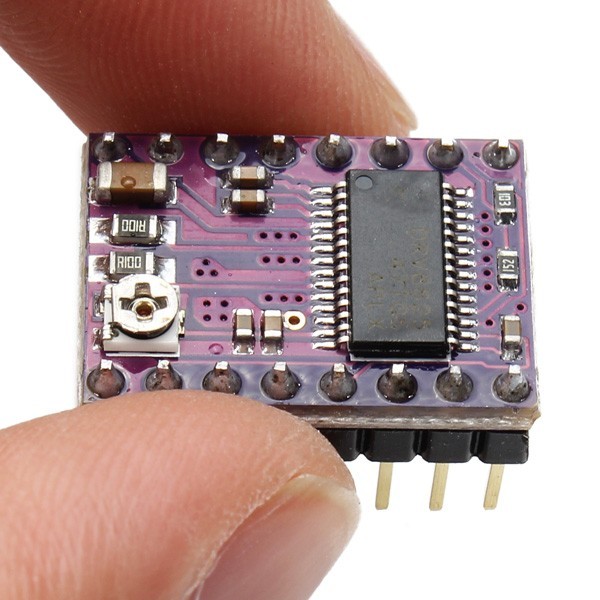
این نمونه برنامه با استفاده از کتابخانه Adafruit PWM Servo Driver برای راه اندازی سروموتور با PCA9685 و آردوینو طراحی شده است. قبل از اجرای برنامه، کتابخانه را باید در آردوینو نصب کنید.
#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
// آدرس PCA9685 را از طریق نرم افزار i2c scanner بررسی کنید
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver(0x40);
// تعریف پایهی سرو موتور
#define SERVO_PIN 0
// محدوده پالس به میکروثانیه (μs)
#define SERVO_MIN_PULSE_WIDTH 600
#define SERVO_MAX_PULSE_WIDTH 2400
void setup() {
Serial.begin(9600);
// شروع ارتباط با PCA9685
pwm.begin();
// تنظیم فرکانس PWM برای کنترل سرو موتور
pwm.setPWMFreq(50);
}
void loop() {
// جابجایی سرو موتور به یک زاویه خاص
moveServo(SERVO_PIN, 90); // جابجایی به زاویه 90 درجه
delay(1000);
moveServo(SERVO_PIN, 0); // جابجایی به زاویه 0 درجه
delay(1000);
moveServo(SERVO_PIN, 180); // جابجایی به زاویه 180 درجه
delay(1000);
}
void moveServo(uint8_t pin, uint16_t angle) {
// تبدیل زاویه به محدوده پالس PWM
uint16_t pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE_WIDTH, SERVO_MAX_PULSE_WIDTH);
// ارسال پالس PWM به سرو موتور
pwm.setPWM(pin, 0, pulse_width);
}
سرو موتور Servo motor یک قطعه مکانیکی است که قابلیت چرخش در زوایای مختلف بسته به نوع سرو موتور دارد. این زاویه بین ۰ تا ۳۶۰ درجه در مدل های مختلف متفاوت است. جهت تشخیص زاویه سرو موتور کافیست شافت را تغییر دهید تا زاویه مشخص شود. در این آموزش توسط یک پتانسیومتر سرو موتور را در زاویه مشخصی قرار داده و سپس مقدار زاویه را در نمایشگر OLED نمایش میدهیم.
مشخصات
برای راهاندازی سروموتور با آردوینو، نیاز به تغذیه مناسب برای هر دو دارید. سروموتورها نیاز به ولتاژ و جریان معینی دارند، و بستگی به نوع و مدل سروموتور ممکن است این مقادیر متغیر باشند.در اغلب موارد، سروموتورها به ولتاژ متغیری از 4.8 ولت تا 7.4 ولت یا بیشتر نیاز دارند. برخی از سروموتورها از ولتاژ بالاتر نیز پشتیبانی میکنند، اما حتماً باید مشخصات فنی سروموتور خود را چک کنید تا از تغذیه مناسب استفاده کنید.در مورد آردوینو، برخی مدلها مانند Arduino Uno و Nano به صورت مستقیم از ولتاژ 5 ولت USB پشتیبانی میکنند. بنابراین، اگر سروموتور شما نیاز به ولتاژ 5 ولت دارد، میتوانید از منبع تغذیه USB آردوینو استفاده کنید.در صورتی که سروموتور شما به ولتاژ بیشتری نیاز دارد، میتوانید از منبع تغذیه خارجی به جای USB آردوینو استفاده کنید
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم