











توجه: فروش حضوری نداریم همپنین قیمت و موجودی به روز هستند. ساعات پاسخگویی از 9 تا 4 عصر
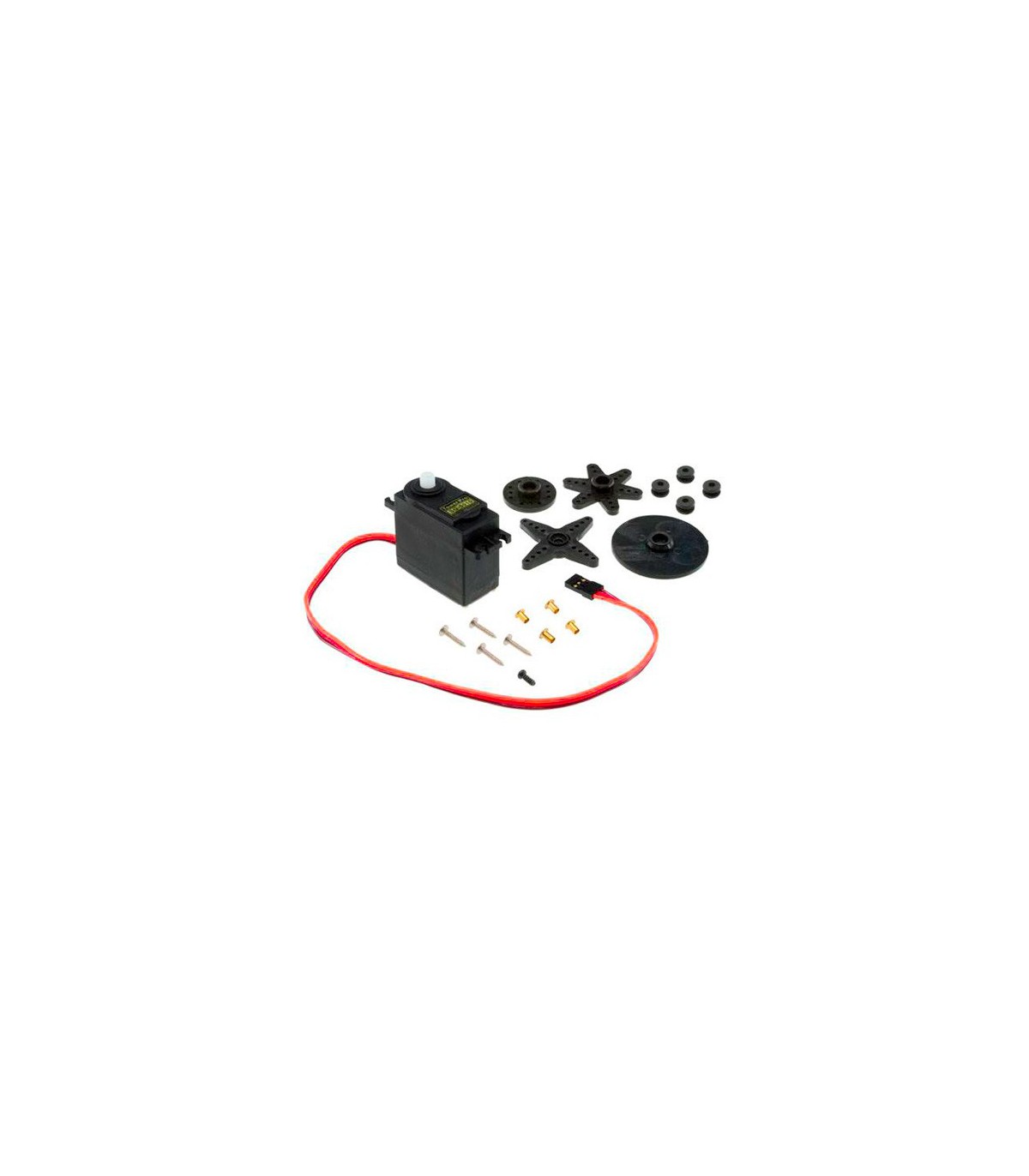
SG5010 یک نوع موتور سرو (Servo) است که در رباتیک و پروژه های آردوینو استفاده میشود که کنترل دقیق موقعیت زاویهای را نیاز دارند. موتورهای سرو به منظور حرکت به زاویه مشخصی طراحی شدهاند و این حرکت بر اساس سیگنالهای الکتریکیای است که دریافت میکنند. موتور سرو SG5010 به دلیل گشتاور بالا شناخته میشود.
در ادامه جهت راه اندازی سرو موتور SG5010 با آردوینو یک کد نوشته است.در ابتدا، کتابخانه Servo را به برنامه اضافه میکنیم تا بتوانیم از آن برای کنترل موتور سرو استفاده کنیم. یک شیء از نوع Servo به نام servoMotor ایجاد میکنیم تا بتوانیم موتور سرو را کنترل کنیم.در تابع setup، موتور سرو را به پین 9 آردوینو متصل میکنیم تا بتوانیم به طور آنالوگی از آن استفاده کنیم.در تابع loop، موتور سرو را به ترتیب به زاویههای 0، 90 و 180 درجه میچرخانیم.در این کد آردوینو، موتور سرو SG5010 را در سه حالت زاویهای مختلف (0، 90 و 180 درجه) حرکت میدهد و بین هر حرکت، به مدت 1 ثانیه صبر میکند.
#include <Servo.h>
Servo servoMotor; // ساخت یک شیء از نوع Servo برای کنترل موتور سرو SG5010
void setup() {
servoMotor.attach(9); // موتور سرو را به پین 9 آردوینو متصل کنید
}
void loop() {
// حرکت موتور سرو به زاویه 0 درجه
servoMotor.write(0);
delay(1000); // صبر برای 1 ثانیه
// حرکت موتور سرو به زاویه 90 درجه
servoMotor.write(90);
delay(1000); // صبر برای 1 ثانیه
// حرکت موتور سرو به زاویه 180 درجه
servoMotor.write(180);
delay(1000); // صبر برای 1 ثانیه
}
برای راه اندازی سرو موتور با میکروپایتون کد زیر نوشته شده است.در ابتدا ماژول machine برای کنترل سختافزار میکروپایتون و utime برای کنترل توقفها.پین متصل به موتور سرو را تعریف میکنیم و سپس یک شیء PWM برای کنترل موتور سرو ایجاد میکنیم.در حلقه اصلی برنامه، موتور سرو را به ترتیب به زاویههای 0، 90 و 180 درجه میچرخانیم.با تابع servo.duty() مقدار PWM ارسالی به موتور سرو را تنظیم میکنیم. این مقادیر بین 0 تا 1023 است که معادل زاویههای 0 تا 180 درجه هستند.هر بار که موتور به یک زاویه میرسد، با تابع utime.sleep()، برنامه به مدت 1 ثانیه متوقف میشود تا موتور به زاویه مطلوب برسد.
import machine
import utime
# تعریف پین متصل به موتور سرو
servo_pin = machine.Pin(9)
# ایجاد شیء موتور سرو با استفاده از PWM
servo = machine.PWM(servo_pin)
while True:
# حرکت موتور سرو به زاویه 0 درجه
servo.duty(40) # زاویه 0 درجه
utime.sleep(1) # صبر برای 1 ثانیه
# حرکت موتور سرو به زاویه 90 درجه
servo.duty(77) # زاویه 90 درجه
utime.sleep(1) # صبر برای 1 ثانیه
# حرکت موتور سرو به زاویه 180 درجه
servo.duty(115) # زاویه 180 درجه
utime.sleep(1) # صبر برای 1 ثانیه
مشخصات
ساعت تماس همه روزه از 9 صبح تا 5 عصر (بجز روزهای تعطیل) البته فروشگاه ما به صورت آنلاین است و میتوانید خریدتان را انجام دهید. اما اگر سوالی داشتید که به تماس تلفنی نیاز داشت، فقط در ساعتهای اعلام شده در خدمتیم.
شماره روبیکا و ایتا، فقط پیام، پاسخ به سوالات قبل از خرید و دریافت تصاویر کالاها
ارسال سریع تهران (تحویل همان روز)
تمامی شهرهای ایران با پست
بخش قوانین ارسال و قوانین خرید را مطالعه کنید.
لطفا ابتدا وارد شوید.
ورود به سیستمیک حساب کاربری رایگان برای ذخیره آیتمهای محبوب ایجاد کنید.
ورود به سیستم